主要内容
检测和跟踪
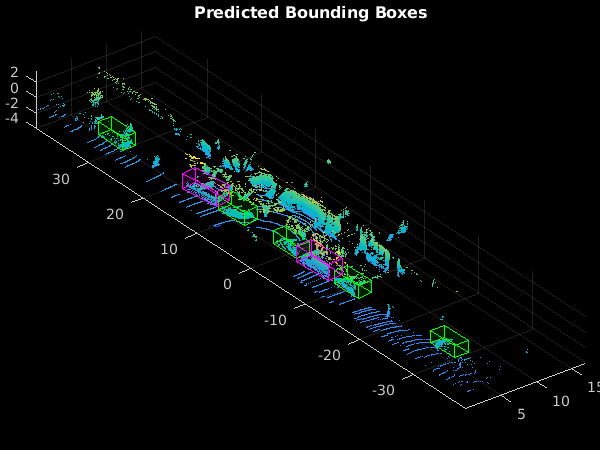
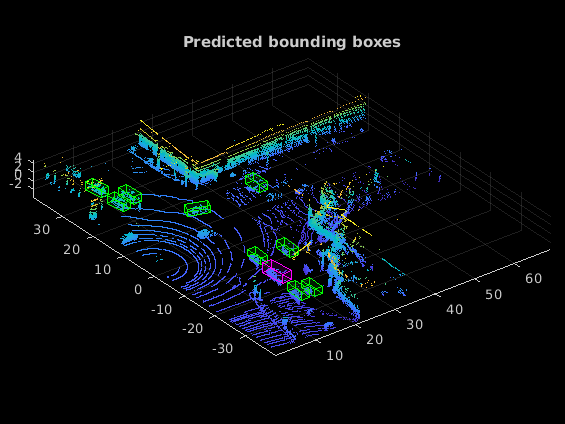
激光雷达点云数据中的目标检测、形状拟合和跟踪
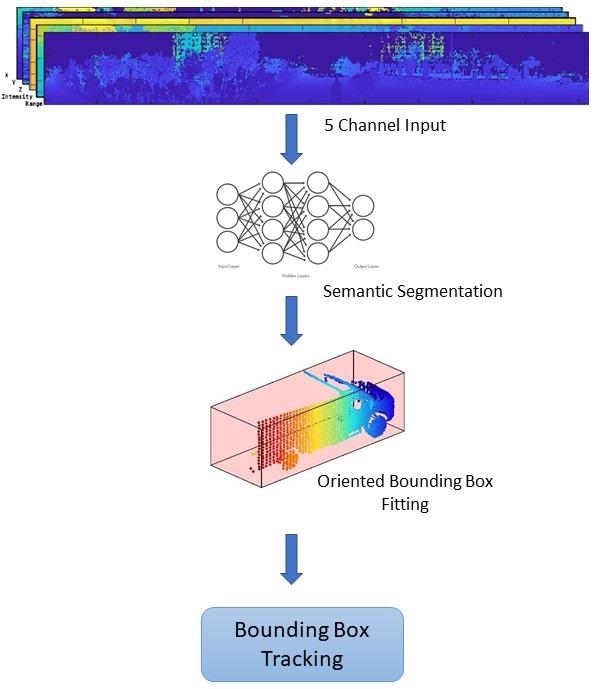
目标检测是激光雷达的主要应用。激光雷达点云数据中检测到的目标对于跟踪和标记等下游工作流程至关重要。Lidar Toolbox™提供对象检测CNN PointPillars,用于开发自定义对象检测模型。
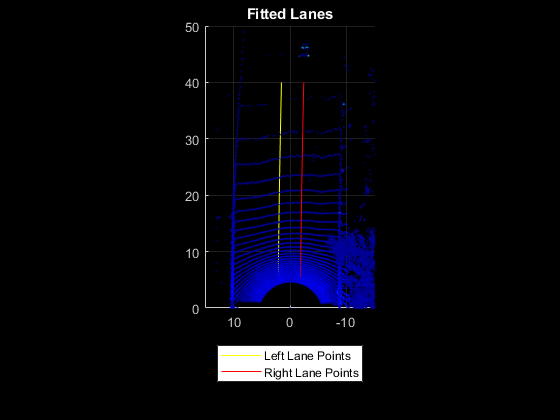
激光雷达工具箱提供车辆和道路的检测和跟踪工作流程。大多数跟踪工作流使用联合概率数据关联(JPDA)跟踪器。
功能
主题
了解如何使用点云进行深度学习。
用于深度学习的数据存储(深度学习工具箱)
学习如何在深度学习应用程序中使用数据存储。
深度学习层列表(深度学习工具箱)
发现MATLAB中所有的深度学习层®.
比较可视化功能。
特色的例子

你也可以从以下列表中选择一个网站: