开始使用激光雷达标签
的激光雷达贴标签机该应用程序允许您以交互方式标记点云或点云序列中的地面实况数据,并生成相应的地面实况数据。
此示例演示了激光雷达贴标签机应用程序在一个激光雷达地面真实数据标记工作流程。
加载激光雷达数据到标签
使用激光雷达贴标签机用于以交互方式标记点云文件和点云文件序列的应用程序。
打开激光雷达贴标机应用程序
打开激光雷达贴标签机应用程序,在Matlab®在命令提示下,输入此命令。
利达拉贝尔
应用程序打开一个空会话。
或者,您也可以从打开应用程序应用程序选项卡,在图像处理与计算机视觉.
从数据源加载信号
的激光雷达贴标签机应用程序允许您从多种类型的数据源加载信号。在应用程序中,a数据源包含一个或多个要标记的信号的文件或文件夹。使用此过程加载点云序列的数据。
在应用程序工具条上,单击进口>添加点云这个选择的点云窗口打开时源类型参数已设置为
点云序列.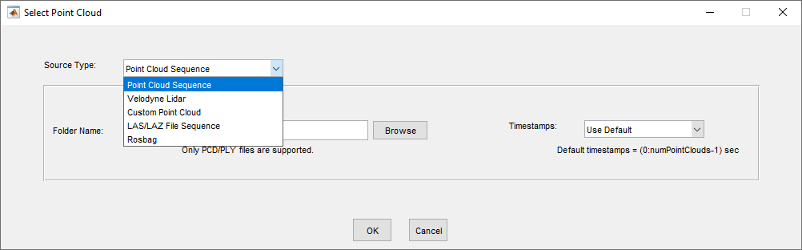
在文件夹名称参数,浏览到包含要加载的点云数据(PCD)文件序列的文件夹,单击选择文件夹.
如果在MATLAB工作区中有时间戳变量,请设置时间戳参数
从工作空间而且,在从工作区进口窗口中,选择变量并单击好啊.否则,设置为使用默认值.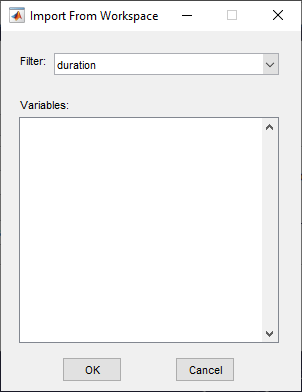
在选择的点云窗口中,单击好啊。点云序列将加载到应用程序中。


创建标签和属性
将点云数据加载到激光雷达贴标签机应用程序,创建标签定义和属性。标签定义包含您希望用于注释点的标签的相关信息。您可以在应用程序中交互式地创建标签定义,或通过使用labelDefinitionCreatorLidar对象
创建ROI标签定义
一个ROI标签是对应于感兴趣区域(ROI)的标签。
在ROI标签选项卡,单击左窗格中的标签.
创建一个
长方体标签,并为标签提供名称。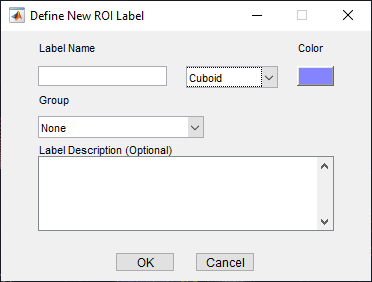
从
集团列表中,选择新组并为组提供一个名称。向组添加标签是可选的。指定的组名将显示在ROI标签选项卡下的指定标签名称。

有关这些标签的详细信息,请参见ROI标签和属性.
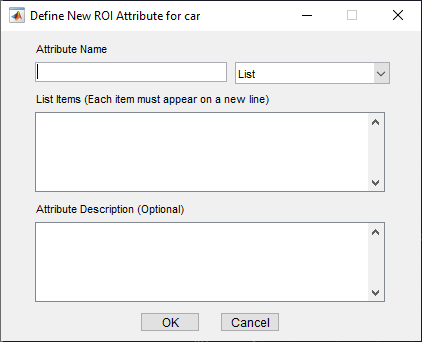
创建ROI属性
一个ROI属性指定ROI标签的附加信息。您可以定义这些类型的ROI属性。
数值-指定数字标量属性,例如标记车辆上的门数。字符串-指定一个字符串标量属性,例如车辆的颜色。逻辑-指定逻辑上的true或false属性,例如车辆是否处于运动状态。列表-指定预定义字符串的下拉列表属性,例如车辆的品牌或型号。
使用此过程创建属性。
在ROI标签选项卡,选择标签并单击属性.
在列表中提供名称属性名称盒子。选择属性类型,单击好啊.

有关这些属性的详细信息,请参见ROI标签和属性.
创建场景标签定义
一个现场标签定义整个场景的附加信息。使用场景标签来描述条件,如光照和天气,或事件,如车道变化。
使用此过程创建场景标签定义。
选择场景标签选项卡,然后单击定义新的场景标签.
在定义新场景标签窗口中为标签提供一个名称。
选择一个颜色的标签。
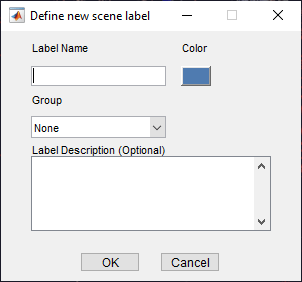
从
集团列表中,选择新组并为组提供一个名称。向组添加标签是可选的。的场景标签窗格显示场景标签定义。

使用自动化标记点云
您可以使用自动化算法,通过使用其中一个包含的算法或通过创建和导入自定义自动化算法来自动标记数据。有关创建自定义自动化算法的更多详细信息,请参阅创建自动标记算法这个app includes the激光雷达目标跟踪和点云时间插值器标签自动算法。
使用这个过程来使用自动化算法标记点云数据。
将数据加载到应用程序中,并创建ROI标签定义。
在标签应用程序工具条的选项卡,位于自动贴标部分中,点击选择算法.
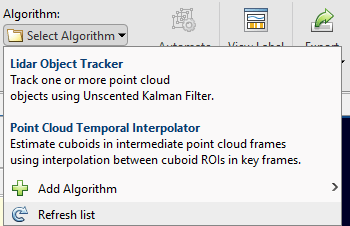
选择自动化算法。
点击自动化然后按照应用程序右窗格中的自动化说明进行操作。

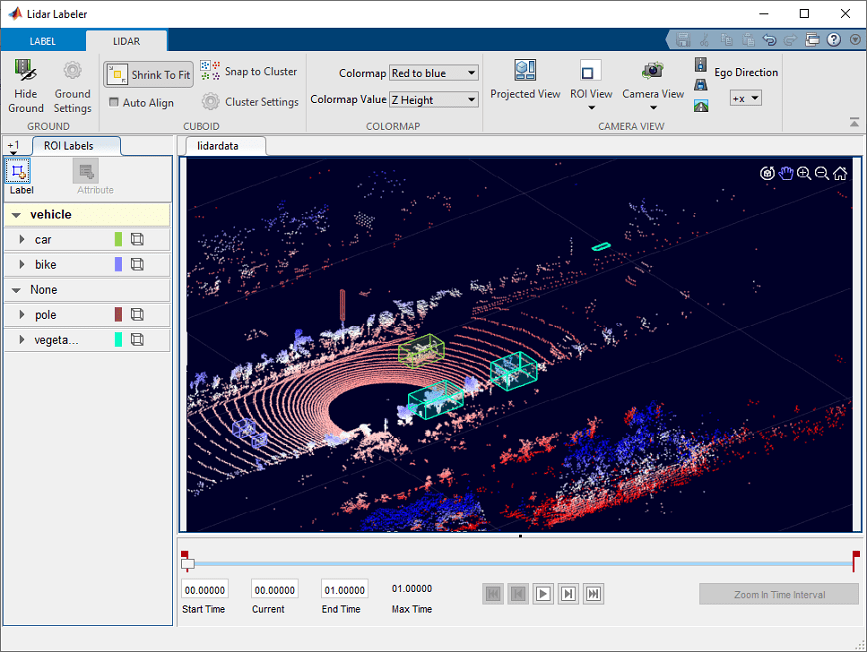
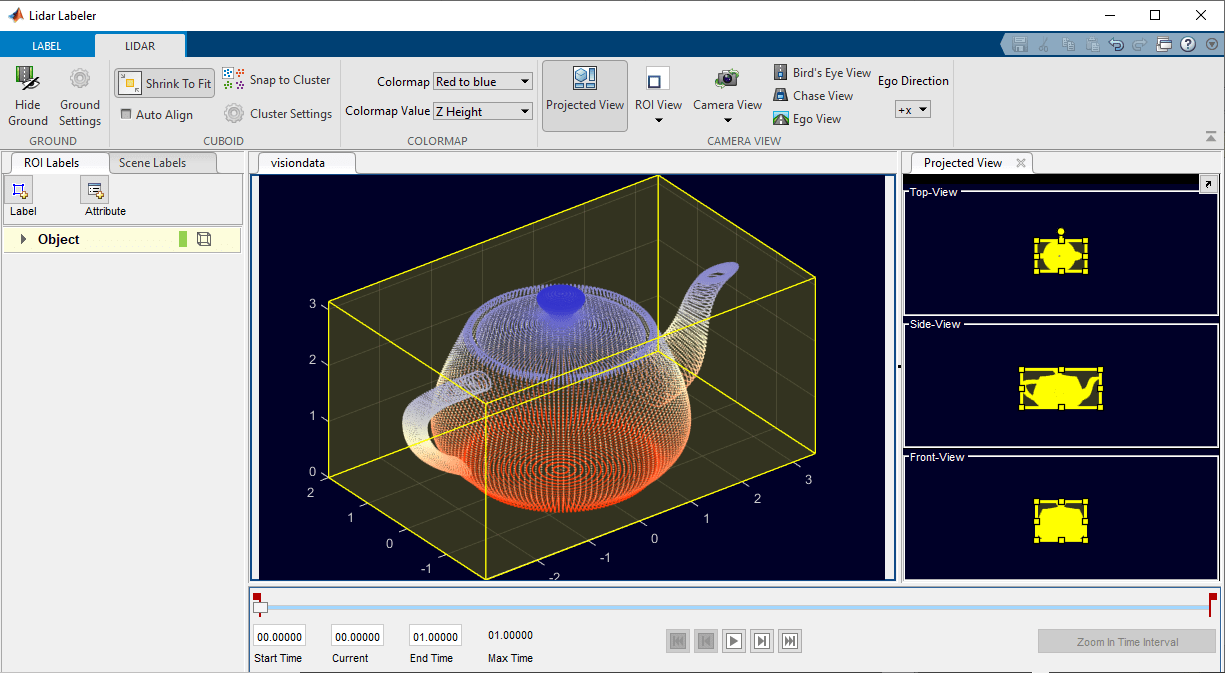
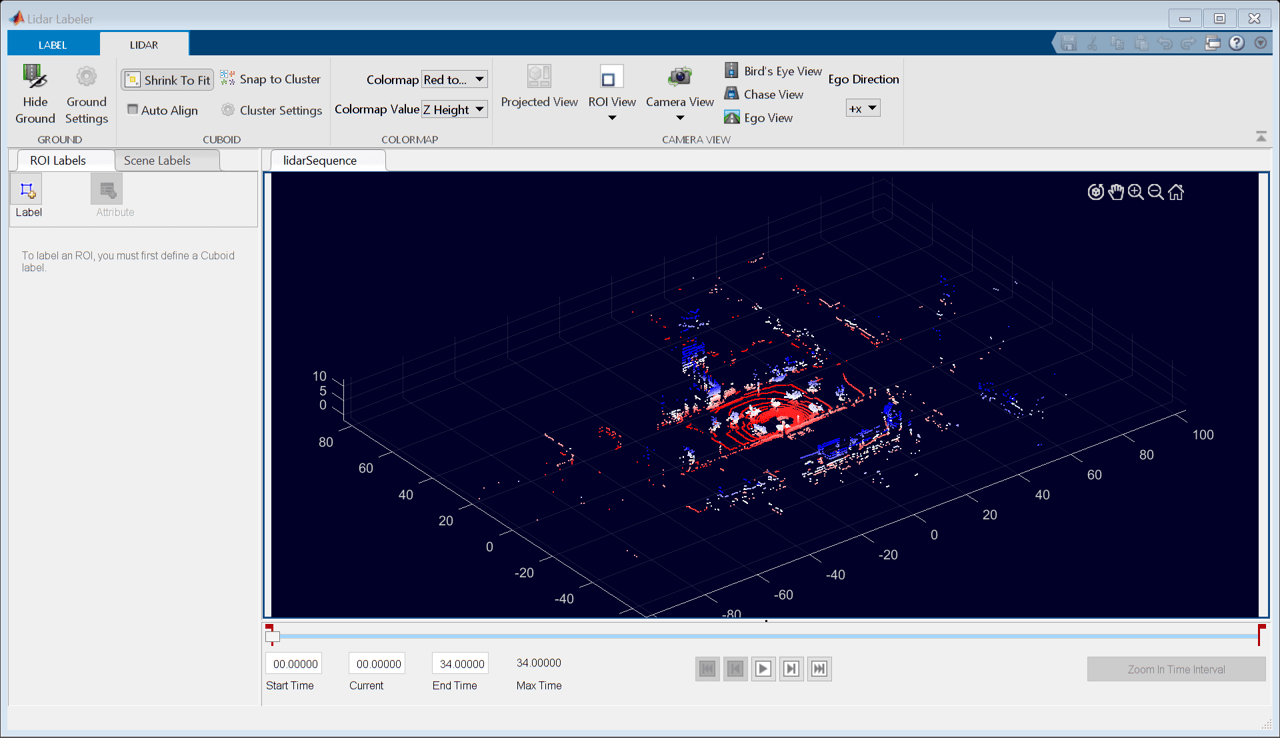
查看和调整标签
为点云数据创建标签后,应用程序将提供查看、调整和比较点云和标签数据的选项。
投影视图
在激光雷达在应用程序工具条的选项卡上,单击投影视图在前视图、俯视图和侧视图中同时查看所选标签。使用这些视图手动调整标签的准确性。
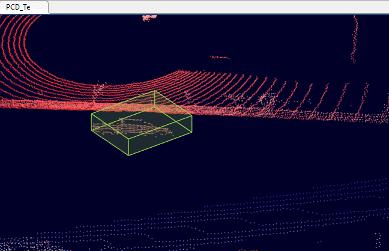
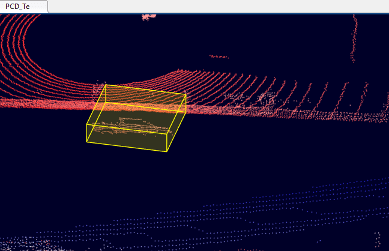
启用自动对齐选项使长方体适合于标签数据,并使标签在对象的方向上对齐。这张图片显示了带有和不带有标签的区别自动对齐选项已启用。
| 无标签自动对齐选项 | 贴上标签自动对齐选项 |
|
|
|
相机视图
使用相机视图选项保存和重用点云数据的自定义视图。您可以通过单击旋转,平移和缩放视图,然后通过单击保存视图相机视图并选择保存相机视图.为视图指定一个名称并单击好啊. 您可以随时通过单击返回保存的视图相机视图并从下拉列表中选择已保存的视图。

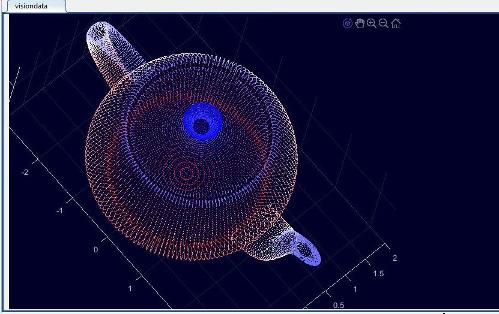
ROI视图
属性可以定义和查看点云中的感兴趣区域(ROI)ROI视图,然后选择选择投资回报率.
应用程序打开调整投资回报率限制对话框,其中包含ROI参数。
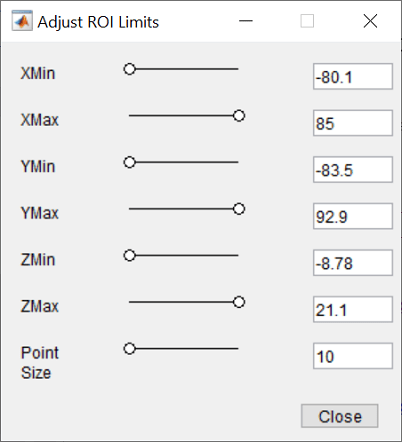
指明x-,y- - - - - -,z-轴限制对于ROI,拖动相应的最小值和最大值滑块。或者,您可以在相应的文本框中键入新的最小值或最大值。您还可以使用点的大小参数。通过增加点的大小来改进稀疏点云的可视化。如果您想返回到点云的完整视图,请单击ROI视图并选择全视图.
同步图像查看器
将外部工具连接到应用程序以显示时间同步的图像,以便在标记时用作参考。见lidar.syncImageViewer.SyncImageViewer班以下示例显示如何将外部图像显示器连接到激光雷达贴标签机.
连接图像显示到激光雷达标签
将图像显示工具连接到激光雷达贴标签机应用程序。使用应用程序和工具显示同步的激光雷达和图像数据。
指定要加载到应用程序中的激光雷达数据的名称。
sourceName=fullfile(“lidarSequence”);
将视频显示连接到应用程序并显示同步数据。
lidarLabeler (sourceName“SyncImageViewerTargetHandle”, @helperSyncImageDisplay);

导出标签
在标签选项卡的应用程序工具条,选择导出标签>到工作区. 在“导出到工作区”窗口中,保留默认的导出变量名称,gTruth,然后单击好啊. 该应用程序导出一个地老虎gTruth,到Matlab工作区。此对象包含从App会话捕获的地面真理LIDAR标签数据。
它的性质地老虎对象gTruth,包含有关信号数据源、标签定义和来自相关应用程序会话的标签的信息。使用这些命令显示关于对象及其每个属性的信息。
gTruth—显示虚拟机的属性地老虎对象gtruth.datasource.—显示点云数据的来源信息。gTruth.LabelDefinitions-显示有关标签定义的信息表。金丝雀-显示ROI和场景标签数据。
另请参阅
应用程序
对象
相关话题
您还可以从以下列表中选择网站: