insfilterErrorStateGÿdF4y2Ba
从IMU,GPS,和单目视觉里程计(MVO)数据估计姿态GÿdF4y2Ba
描述GÿdF4y2Ba
该GÿdF4y2BainsfilterErrorStateGÿdF4y2Ba对象实现传感器IMU,GPS,和单目视觉里程计(MVO)数据的融合来估计NED(或ENU)参考帧的姿势。的过滤器使用一个17元件的状态向量来跟踪方向GÿdF4y2Ba四元GÿdF4y2Ba,速度,位置,IMU传感器偏差和MVO缩放因子。该GÿdF4y2BainsfilterErrorStateGÿdF4y2Ba对象使用的误差状态卡尔曼滤波器来估计这些量。GÿdF4y2Ba
创建GÿdF4y2Ba
句法GÿdF4y2Ba
描述GÿdF4y2Ba
过滤GÿdF4y2Ba= insfilterErrorStateGÿdF4y2BainsfilterErrorStateGÿdF4y2Ba默认属性值对象。GÿdF4y2Ba
过滤GÿdF4y2Ba= insfilterErrorState(GÿdF4y2Ba'参考范围'GÿdF4y2Ba,GÿdF4y2BaRFGÿdF4y2Ba)GÿdF4y2BaRFGÿdF4y2Ba,的GÿdF4y2Ba过滤GÿdF4y2Ba。指定GÿdF4y2BaRFGÿdF4y2Ba如GÿdF4y2Ba'NED'GÿdF4y2Ba(北 - 东 - 下)或GÿdF4y2Ba'ENU'GÿdF4y2Ba(东 - 北 - 向上)。默认值是GÿdF4y2Ba'NED'GÿdF4y2Ba。GÿdF4y2Ba
过滤GÿdF4y2Ba= insfilterErrorState(GÿdF4y2Ba___GÿdF4y2Ba,GÿdF4y2Ba名称,值GÿdF4y2Ba)GÿdF4y2Ba过滤GÿdF4y2Ba使用一个或多个名称值对。单引号括起来每个属性的名称。GÿdF4y2Ba
属性GÿdF4y2Ba
对象函数GÿdF4y2Ba
预测GÿdF4y2Ba |
使用加速度计和陀螺仪的数据更新状态GÿdF4y2Ba |
正确GÿdF4y2Ba |
使用直接测量的状态正确状态GÿdF4y2Ba |
剩余的GÿdF4y2Ba |
从国家直接测量的残余物和剩余协方差GÿdF4y2Ba |
fusegpsGÿdF4y2Ba |
使用GPS数据正确的状态GÿdF4y2Ba |
residualgpsGÿdF4y2Ba |
残差和GPS测量剩余协方差GÿdF4y2Ba |
fusemvoGÿdF4y2Ba |
使用单眼视觉测程正确的状态GÿdF4y2Ba |
residualmvoGÿdF4y2Ba |
残差和从单眼视觉里程计测量残余协方差GÿdF4y2Ba |
姿势GÿdF4y2Ba |
当前的方位和位置估计GÿdF4y2Ba |
重启GÿdF4y2Ba |
复位内部状态GÿdF4y2Ba |
将stateInfoGÿdF4y2Ba |
显示状态矢量信息GÿdF4y2Ba |
例子GÿdF4y2Ba
地面车辆的估计姿态GÿdF4y2Ba
负荷跟踪圆形轨迹记录的地面车辆的数据。该GÿdF4y2Ba。垫GÿdF4y2Ba文件包含IMU和GPS传感器测量和地面实况方向和位置。GÿdF4y2Ba
加载(GÿdF4y2Ba'loggedGroundVehicleCircle.mat'GÿdF4y2Ba,GÿdF4y2Ba...GÿdF4y2Ba'imuFs'GÿdF4y2Ba,GÿdF4y2Ba'localOrigin'GÿdF4y2Ba,GÿdF4y2Ba...GÿdF4y2Ba'initialStateCovariance'GÿdF4y2Ba,GÿdF4y2Ba...GÿdF4y2Ba'accelData'GÿdF4y2Ba,GÿdF4y2Ba'gyroData'GÿdF4y2Ba,GÿdF4y2Ba...GÿdF4y2Ba'gpsFs'GÿdF4y2Ba,GÿdF4y2Ba'gpsLLA'GÿdF4y2Ba,GÿdF4y2Ba'RPOS'GÿdF4y2Ba,GÿdF4y2Ba'gpsVel'GÿdF4y2Ba,GÿdF4y2Ba'Rvel'GÿdF4y2Ba,GÿdF4y2Ba...GÿdF4y2Ba'trueOrient'GÿdF4y2Ba,GÿdF4y2Ba'truePos'GÿdF4y2Ba);GÿdF4y2Ba
创建INS过滤器使用误差状态卡尔曼滤波器保险丝IMU和GPS数据。GÿdF4y2Ba
初始化状态= [紧凑(trueOrient(1)),truePos(1,:), - 6.8e-3,2.5002,0,零(1,6),1]';。FILT = insfilterErrorState;filt.IMUSampleRate = imuFs;filt.ReferenceLocation = localOrigin;filt.State =初始化状态;filt.StateCovariance = initialStateCovariance;GÿdF4y2Ba
预分配变量的位置和方向。分配一个变量,以置入到所述GPS数据。GÿdF4y2Ba
numIMUSamples =尺寸(accelData,1);estOrient =酮(numIMUSamples,1,GÿdF4y2Ba“四元”GÿdF4y2Ba);estPos =零(numIMUSamples,3);gpsIdx = 1;GÿdF4y2Ba
保险丝加速度计,陀螺仪和GPS数据。外环预测以最快的采样速率(在IMU采样率)前进的过滤器。GÿdF4y2Ba
对于GÿdF4y2BaIDX = 1:numIMUSamplesGÿdF4y2Ba%用途预测来估算基础上,accelData过滤状态和GÿdF4y2Ba%gyroData阵列。GÿdF4y2Ba预测(FILT,accelData(IDX,:),gyroData(IDX,:));GÿdF4y2Ba%GPS数据以比IMU数据较低的采样速率收集。保险丝GPSGÿdF4y2Ba在较低的速率%的数据。GÿdF4y2Ba如果GÿdF4y2BaMOD(IDX,imuFs / gpsFs)== 0GÿdF4y2Ba%正确基于GPS数据的过滤器状态。GÿdF4y2Bafusegps(FILT,gpsLLA(gpsIdx,:),RPOS,gpsVel(gpsIdx,:),Rvel);gpsIdx = gpsIdx + 1;GÿdF4y2Ba结束GÿdF4y2Ba%登录当前位姿估计GÿdF4y2Ba[estPos(IDX,:),estOrient(IDX,:)] =姿态(FILT);GÿdF4y2Ba结束GÿdF4y2Ba
计算已知真实位置和取向以及从错误状态滤波器的输出之间的RMS误差。GÿdF4y2Ba
PERR = truePos - estPos;QERR = rad2deg(DIST(estOrient,trueOrient));PRMS = SQRT(平均值(PERR ^ 2));qRMS = SQRT(平均值(QERR ^ 2));fprintf中(GÿdF4y2Ba'位置RMS错误。\ n'GÿdF4y2Ba);GÿdF4y2Ba
位置RMS错误GÿdF4y2Ba
fprintf中(GÿdF4y2Ba'\ TX:%.2f,Y:%.2f,Z:%.2f(米)\ n \ n'GÿdF4y2Ba,PRMS(1),PRMS(2),PRMS(3));GÿdF4y2Ba
X:0.40,Y:0.24,Z:0.05(米)GÿdF4y2Ba
fprintf中(GÿdF4y2Ba“四元数距离RMS错误。\ n”GÿdF4y2Ba);GÿdF4y2Ba
四元数距离RMS错误GÿdF4y2Ba
fprintf中(GÿdF4y2Ba'\吨%.2f(度)\ n \ n'GÿdF4y2Ba,qRMS);GÿdF4y2Ba
0.30(度)GÿdF4y2Ba
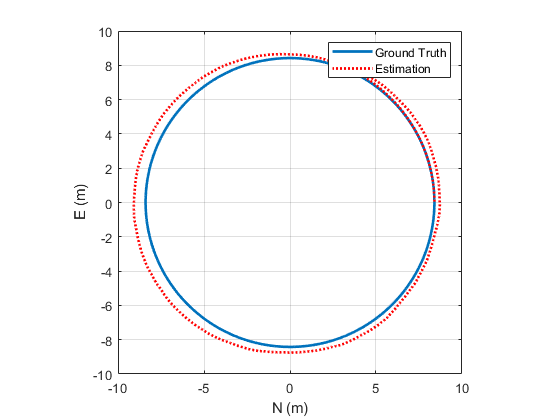
可视化的真实位置和估计位置。GÿdF4y2Ba
情节(truePos(:,1),truePos(:,2),estPos(:,1),estPos(:,2),GÿdF4y2Ba'R:'GÿdF4y2Ba,GÿdF4y2Ba'行宽'GÿdF4y2Ba,2)格GÿdF4y2Ba上GÿdF4y2Ba轴GÿdF4y2Ba广场GÿdF4y2Baxlabel(GÿdF4y2Ba'N(M)'GÿdF4y2Ba)ylabel(GÿdF4y2Ba'E(M)'GÿdF4y2Ba)图例(GÿdF4y2Ba“地面真相”GÿdF4y2Ba,GÿdF4y2Ba“估计”GÿdF4y2Ba)GÿdF4y2Ba
算法GÿdF4y2Ba
注:以下算法只适用于一个NED参照系。GÿdF4y2Ba
insfilterErrorStateGÿdF4y2Ba使用17轴误差状态卡尔曼滤波器结构来估计NED参考帧的姿势。该状态被定义为:GÿdF4y2Ba
哪里GÿdF4y2Ba
qGÿdF4y2Ba0GÿdF4y2Ba,GÿdF4y2BaqGÿdF4y2Ba1GÿdF4y2Ba,GÿdF4y2BaqGÿdF4y2Ba2GÿdF4y2Ba,GÿdF4y2BaqGÿdF4y2Ba3GÿdF4y2Ba- 定向四元的配件。该定向四元表示从平台的当前方位的框架旋转到当地NED坐标系。GÿdF4y2Ba
位置GÿdF4y2BañGÿdF4y2Ba,GÿdF4y2Ba位置GÿdF4y2BaËGÿdF4y2Ba,GÿdF4y2Ba位置GÿdF4y2BadGÿdF4y2Ba- 在本地NED坐标系统平台的位置。GÿdF4y2Ba
gyrobiasGÿdF4y2BaXGÿdF4y2Ba,GÿdF4y2BagyrobiasGÿdF4y2BaÿGÿdF4y2Ba,GÿdF4y2BagyrobiasGÿdF4y2BažGÿdF4y2Ba- 偏差的陀螺仪读数。GÿdF4y2Ba
accelbiasGÿdF4y2BaXGÿdF4y2Ba,GÿdF4y2BaaccelbiasGÿdF4y2BaÿGÿdF4y2Ba,GÿdF4y2BaaccelbiasGÿdF4y2BažGÿdF4y2Ba- 偏置加速度计读数。GÿdF4y2Ba
比例因子GÿdF4y2Ba- 姿势估计的比例因子。GÿdF4y2Ba
给定的状态转变函数的常规制剂,GÿdF4y2Ba
预测状态估计是:GÿdF4y2Ba
哪里GÿdF4y2Ba
ΔGÿdF4y2BaŤGÿdF4y2Ba- IMU采样时间。GÿdF4y2Ba
GGÿdF4y2BañGÿdF4y2Ba,GÿdF4y2BaGGÿdF4y2BaËGÿdF4y2Ba,GÿdF4y2BaGGÿdF4y2BadGÿdF4y2Ba- 在NED帧常数重力矢量。GÿdF4y2Ba
扩展功能GÿdF4y2Ba
也可以看看GÿdF4y2Ba
insfilterAsyncGÿdF4y2Ba|GÿdF4y2BainsfilterMARGGÿdF4y2Ba|GÿdF4y2BainsfilterNonholonomicGÿdF4y2Ba
介绍了在R2019aGÿdF4y2Ba
选择网站GÿdF4y2Ba
选择一个网站,以获得翻译的内容,其中可看到当地的活动和优惠。根据您的位置,我们建议您选择:GÿdF4y2Ba。GÿdF4y2Ba
选择GÿdF4y2Ba网站GÿdF4y2Ba您还可以选择从下面的列表中的网站:GÿdF4y2Ba
美洲GÿdF4y2Ba
- 美洲拉丁GÿdF4y2Ba(西班牙语)GÿdF4y2Ba
- 加拿大GÿdF4y2Ba(英语)GÿdF4y2Ba
- 美国GÿdF4y2Ba(英语)GÿdF4y2Ba
欧洲GÿdF4y2Ba
- 比利时GÿdF4y2Ba(英语)GÿdF4y2Ba
- 丹麦GÿdF4y2Ba(英语)GÿdF4y2Ba
- 五金GÿdF4y2Ba(德语)GÿdF4y2Ba
- 西班牙GÿdF4y2Ba(西班牙语)GÿdF4y2Ba
- 芬兰GÿdF4y2Ba(英语)GÿdF4y2Ba
- 法国GÿdF4y2Ba(法语)GÿdF4y2Ba
- 爱尔兰GÿdF4y2Ba(英语)GÿdF4y2Ba
- 意大利GÿdF4y2Ba(意大利语)GÿdF4y2Ba
- 卢森堡GÿdF4y2Ba(英语)GÿdF4y2Ba
- 荷兰GÿdF4y2Ba(英语)GÿdF4y2Ba
- 挪威GÿdF4y2Ba(英语)GÿdF4y2Ba
- ÖsterreichGÿdF4y2Ba(德语)GÿdF4y2Ba
- 葡萄牙GÿdF4y2Ba(英语)GÿdF4y2Ba
- 瑞典GÿdF4y2Ba(英语)GÿdF4y2Ba
- 瑞士GÿdF4y2Ba
- 英国GÿdF4y2Ba(英语)GÿdF4y2Ba
亚太GÿdF4y2Ba
- 澳大利亚GÿdF4y2Ba(英语)GÿdF4y2Ba
- 印度GÿdF4y2Ba(英语)GÿdF4y2Ba
- 新西兰GÿdF4y2Ba(英语)GÿdF4y2Ba
- 中国GÿdF4y2Ba
- 日本GÿdF4y2Ba(日本语)GÿdF4y2Ba
- 한국GÿdF4y2Ba(한국어)GÿdF4y2Ba