occupancyMap3D
创建3-d占用地图
描述
该occupancyMap3D类存储3-d地图和地图信息。地图被存储作为在概率值八叉树数据结构。类处理任意环境,并扩大其规模动态地根据观察输入。您可以添加意见的点云或具体XYZ位置。这些观察结果更新概率值。概率值表示的位置的占用。八叉树数据结构装饰数据合适地以无论是在存储器和磁盘上保持效率。
创建
描述
OMAP= occupancyMap3D
OMAP= occupancyMap3D(水库)解析度属性。
OMAP= occupancyMap3D(水库,名称,值)名称,值对参数。例如,'FreeThreshold',0.25设置阈值,以考虑细胞无障碍作为0.25的概率值。在引号中每个属性的名称。
属性
对象函数
checkOccupancy |
检查地点是免费或占用 |
getOccupancy |
获取的位置占据概率 |
膨胀 |
充气地图 |
insertPointCloud |
插入件3-d点或点云观测到地图 |
rayIntersection |
找到光线的交叉点并占领地图细胞 |
setOccupancy |
位置设置占据概率 |
显示 |
展会占用地图 |
updateOccupancy |
在位置更新占用概率 |
例子
创建3-d占用地图和充气点
该occupancyMap3D对象存储在3-d空间障碍,使用传感器观测到映射的环境。创建一个地图,从一个点云加点来识别障碍。然后膨胀在地图的障碍,以确保安全操作空间周围的障碍物。
创建occupancyMap3D用10个细胞/米的地图分辨率对象。
map3d的= occupancyMap3D(10);
定义一组3-d点作为从姿态的观察[arrow-QW QX QY QZ]。这个姿势是为观察这些点,并集中在原点传感器。定义两个点集插入多观察。
姿态= [0 0 0 1 0 0 0];点= repmat((0:0.25:2)”,1,3);points2 = [(0:0.25:2) '(2:-0.25:0)'(0:0.25:2)'];maxRange = 5;
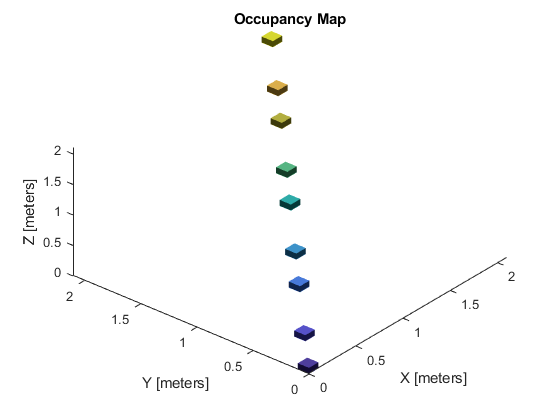
插入使用第一组点insertPointCloud。该函数使用传感器姿态和给定的点以插入观测到地图。颜色显示关联到仅用于说明目的点的高度。
insertPointCloud(map3d的,姿势,点,maxRange)显示(map3d的)
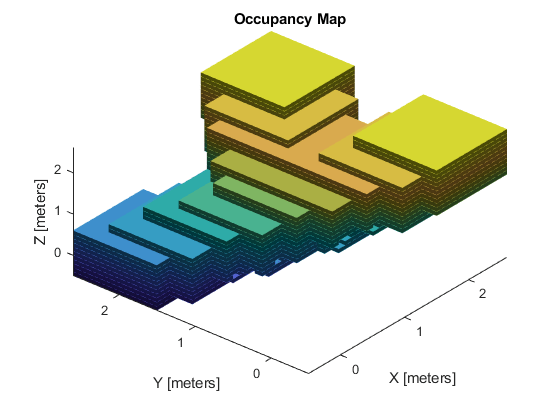
插入第二组点。传感器姿态(原点)和来自先前插入这些点重叠点之间的射线。因此,传感器和新的点之间的自由空间被更新,并且标记为自由空间。
insertPointCloud(map3d的,姿势,points2,maxRange)显示(map3d的)

充气地图添加一个缓冲区安全操作绕过障碍物。限定车辆半径和安全距离,并使用这些值的总和以限定用于地图充气半径。
vehicleRadius = 0.2;safetyRadius = 0.3;inflationRadius = vehicleRadius + safetyRadius;膨胀(map3d的,inflationRadius);秀(map3d的)
算法
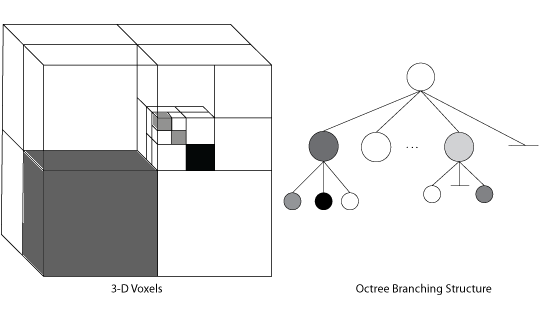
八叉树数据结构
八叉树数据结构是用于的环境的细分成立方体体积称作分层结构素。对于给定的地图体积,空间被递归细分成八个个体素,直到实现期望的地图分辨率(体素尺寸)来实现的。这种细分能够被表示为树,存储概率值在地图位置。
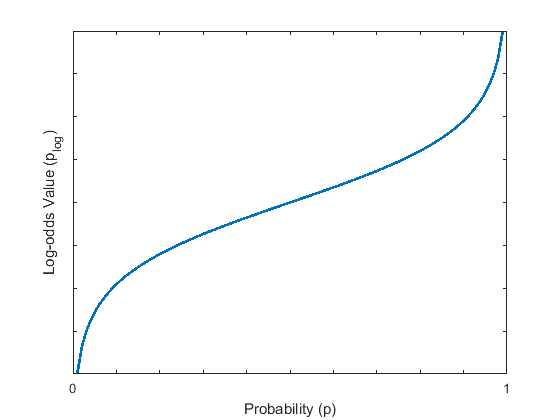
在树中的概率值有一个数优势比表示。使用这种表示,地点很容易地从动态观察和数值误差由于小概率恢复被降低。留在存储器高效,树的下分支的结构,如果它们共享使用该数优势比表示相同的占用值被修剪。
类在内部处理这种数据结构的组织,包括分支的修剪。使用的功能,例如当指定的所有观察作为空间坐标setOccupancy,getOccupancy, 要么insertPointCloud。插入到树,并通过导航树,是基础确定空间坐标和地图的分辨率。
参考
[1]霍农,阿明,启M.亚龙,麻仁Bennewitz,Cyrill Stachniss,和沃尔夫勒姆·伯加德。“OctoMap:一个有效的概率3D映射框架基于八叉树。”自主机器人卷。34,第3期,2013,第189-206 .. DOI:10.1007 / s10514-012-9321-0。
您还可以选择从下面的列表中的网站: