主要内容
使用模态算法
刚体动力学
在许多情况下,一个模型
-轴极点是重要的保持后的模型,例如,刚体动力学的柔性结构对象或控制器的积分器。一个独特的常规,modreal,很好地达到了目的。
modreal使系统进入其模态形式,特征值出现在其a矩阵的对角线上。实特征值出现在1 × 1的块中,复特征值出现在2 × 2的实块中。默认情况下,所有块都是按照特征值大小升序排列,或者按照实部降序排列。因此,指定的数量
-axis极点将模型分成两个系统,其中一个只包含一个
-axis动态,另一个包含剩余的动态。
rng (5678“旋风”);G = rss(30、1、1);%随机30状态模型[Gjw, G2] = modreal (G, 1);只有一个刚体动力学G2。D = Gjw.D;%将G的直流增益放入G2Gjw。D = 0;次要情节(2,1,1)σ(Gjw) ylabel (“刚体”)子图(2,1,2)sigma(G2)“非刚性的身体”)

进一步的模型简化可以在G2没有任何数值上的困难。后G2进一步简化为gre考试,模型的最终近似是简单的Gjw + gre考试.
这个分裂的过程
-axis极点已经在所有模型简化程序中被建立和自动化balancmr,schurmr,hankelmr,bstmr,hankelsv,这样用户就不必担心分解模型。
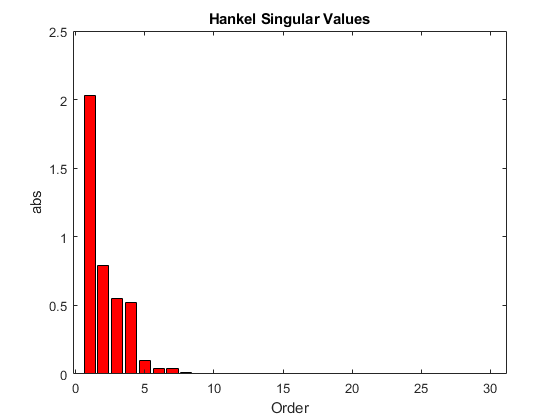
检查汉克尔奇异值图。
hankelsv (G)
计算一个八阶简化模型。
[gr,信息]=减少(G, 8);图波德(G,“b -”、gr、“r——”)传说(“原始”,“减少”)

默认的算法balancmr的减少在用8个州近似出30个州的模型方面做得很好。再次,刚体动力学被保留为进一步的控制器设计。
另请参阅
balancmr|bstmr|hankelmr|hankelsv|modreal|schurmr
相关的话题
你也可以从以下列表中选择一个网站: