hinfsyn
计算h -∞最优控制器
语法
描述
[指定其他计算选项。创建K,CL,γ) = hinfsyn (<年代pan class="argument_placeholder">___,选择)选择,使用hinfsynOptions.指定选择在所有其他输入参数之后。
例子
h∞控制器合成
使用不同的目标性能水平合成一个控制器。本例中的植物基于中使用的增强植物模型主动悬架的鲁棒控制.加载装置。
负载<年代pan style="color:#A020F0">hinfsynExDataP大小(P)
状态空间模型,有5个输出,4个输入,9个状态。
这个装置有五个输出和四个输入,最后两个输出是提供给控制器的测量信号,最后一个输入是控制信号。计算一个<年代pan class="inlineequation"> 最优控制器。
ncont = 1;n mea = 2;(K1, CL,伽马)= hinfsyn (P, n mea, ncont);
由此产生的双输入单输出控制器的状态数与<年代pan class="emphasis">P.
大小(K1)
状态空间模型,有1个输出,2个输入,9个状态。
该控制器达到的最优性能水平返回为γ.这个值是<年代pan class="inlineequation">
闭环系统的范数CL.
γ
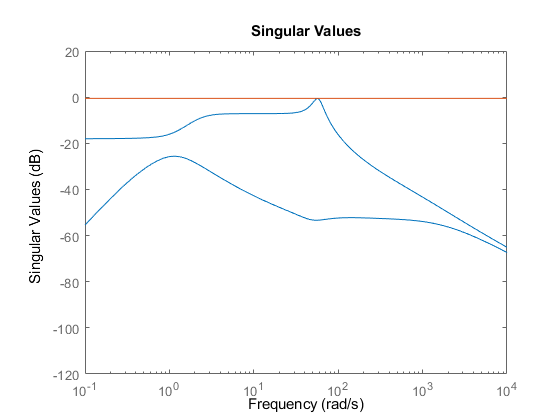
γ= 0.9405
您可以检查闭环系统的奇异值图,以确定其最大奇异值不超过γ.
σ(CL, ss(γ))ylim ([-120, 20]);
具有目标性能水平的控制器综合
对于性能接近最优的控制器,控制器增益有时会变大。如果您知道您的应用程序不需要最优的可实现的性能级别,则可以限制范围<年代pan class="inlineequation">
值,hinfsyn测试。假设你知道<年代pan class="inlineequation">
对于您的应用程序来说已经足够了。使用与例子中相同的植物h∞控制器合成,使用目标性能范围[1.4,1.6]计算控制器。打开显示器,查看计算的进度。
负载<年代pan style="color:#A020F0">hinfsynExDataPncont = 1;n mea = 2;选择= hinfsynOptions (<年代pan style="color:#A020F0">“显示”,<年代pan style="color:#A020F0">“上”);gamRange = [1.4 1.6];[K CLγ,信息]= hinfsyn (P, n mea, ncont gamRange,选择);
测试边界:1.4 <= gamma <= 1.6 gamma X>=0 Y>=0 rho(XY)<1 p/f 1.60e+00 4.9e-07 0.0e+00 1.462e-02 p 1.50e+00 5.0e-07 0.0e+00 1.681e-02 p 1.42e+00 5.0e-07 0.0e+00 1.868e-02 p 1.41e+00 5.0e-07 0.0e+00 1.902e-02 p
显示器显示所有测试的性能级别hinfsyn.在这种情况下,所有测试的性能级别都通过了以下测试hinfsyn适用于闭环稳定性(见算法).尽管最小的测试级别是1.41,控制器为该值返回的实际性能级别为γ,约为0.95。中返回的最小测试级别γ场的信息结构。
info.gamma
ans = 1.4117
如果你想要获得任何控制器都无法达到的性能水平,显示器会告诉你目标太小,并返回一个空的控制器和闭环系统。例如,假设您试图实现0.75的性能级别。
gamTry = 0.75
gamTry = 0.7500
(K CLγ)= hinfsyn (P, n mea, ncont gamTry,选择)
指定的上限GMAX=0.75太小,需要大于0.94。[] [] []
γ=正
Mixed-Sensitivity合成
为下列装置设计一个混合灵敏度控制器,用以下的环形滤波器增强(见mixsyn).
定义植物、加权过滤器和增广植物。
s = zpk (<年代pan style="color:#A020F0">“年代”);G = (s - 1) / (s + 1);W1 = 0.1 * (s + 100) / (100 * (s + 1);W2 = 0.1;W3 = [];P = augw (G, W1 W2, W3);
综合控制器。
[K CL伽马]= hinfsyn (P, 1,1);γ
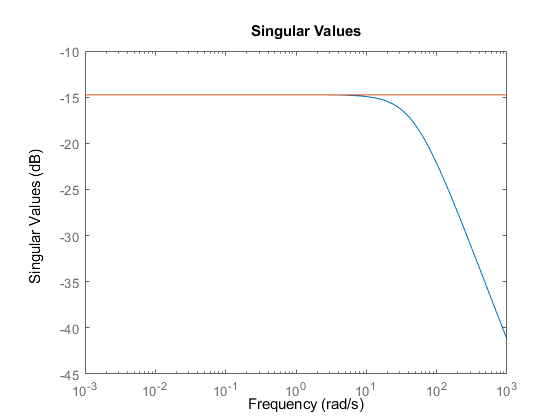
γ= 0.1831
对于这个系统,γ约为0.18分贝,即-15分贝。
检查闭环结果的奇异值。
σ(CL, ss(γ))
为相同的系统计算一个新的控制器<年代pan class="inlineequation"> .
W1 = [];P = augw (G, W1 W2, W3);[K CL伽马]= hinfsyn (P, 1,1);
在本例中,结果控制器K为零,那么闭环传递函数呢CL = K * (1 + G * K)也是零。
输入参数
输出参数

信息合成数据
结构|[]
附加的合成数据,作为结构或[](如果不能达到指定的性能水平)。对于默认的基于riccati的合成方法,信息具有以下字段。
| 场 | 描述 |
|---|---|
γ |
用于计算控制器的性能级别 |
X, Y |
黎卡提微分的解决金宝搏官方网站方案X∞和Y∞对于性能水平 |
Ku,千瓦 |
控制器的状态反馈增益 |
Lx,陆 |
控制器观测器增益 |
怀孕的 |
正规的工厂使用 |
作为 |
所有解决金宝搏官方网站方案控制器参数化,作为状态空间返回( |
对于基于lmi的合成方法,信息包含最佳性能γ以及相应的LMI解金宝搏官方网站R和年代.(使用hinfsynOptions改变合成方法。)
更多关于
所有解决金宝搏官方网站方案控制器
在一般情况下,无穷范数最优控制问题的解是非唯一的。返回的控制器hinfsyn只有一个特解,K.对于默认的基于riccati的方法,信息。作为包含全解控制器参数化K作为.所有解具金宝搏官方网站有闭环性能γ或更少被一个自由稳定的收缩映射参数化问,它受到<年代pan class="inlineequation">
.
换句话说,解决方案包括每个稳定控制器金宝搏官方网站K(年代),使
在这里,<年代pan class="inlineequation">
是闭环传递函数吗CL.这些控制器K(年代)由下列人士提供:
Ks =融通(info.AS问)
在哪里问稳定的LTI系统是否令人满意规范(Q,正)< info.gamma.

提示
算法
默认情况下,hinfsyn使用双riccati公式([1],[2])带环移[3].您可以使用hinfsynOptions更改为基于lmi的方法([4],[5],[6]).您还可以指定最大熵方法。在这种方法中,hinfsyn返回H∞使与该点相关的熵积分最大化的控制器S0.对于连续时间系统,积分为:
在哪里<年代pan class="inlineequation">
是闭环传递函数吗CL.对离散时间系统也使用类似的积分。
对于所有方法,该函数使用一个标准γ-迭代技术来确定性能水平的最优值γ.γ迭代是一个二分算法首先是高估值和低估值γ和迭代γ值接近最优H∞控制设计。
在γ,算法测试aγ值,以确定解决方案是否存在。在基于Riccati的方法中,算法计算稳定Riccati解的最小性能水平金宝搏官方网站<年代pan class="inlineequation">X=X∞/γ和<年代pan class="inlineequation">Y=Y∞/γ存在。对于任何γ大于那个性能水平,在这个范围内gamRange,算法计算中央控制器公式(K公式),并检查闭环稳定性CL =融通(磷、钾).这一步相当于验证条件:
min (eig (X))≥0min (eig (Y))≥0ρ(XY)< 1,其中谱半径ρ(XY) = max (abs (eig (XY)))
一个γ满足这些条件通过.二分法的停止判据要求最后二分法的相对差值γ那失败的价值和最后的γ传递的值小于0.01。(您可以使用hinfsynOptions.)hinfsyn返回与所测试的最小控制器对应的控制器γ值传递。对于离散时间控制器,该算法执行额外的计算来构造馈通矩阵D<年代ub>K.
使用显示选择hinfsynOptions为了使hinfsyn显示值,显示每个条件满足的条件γ值测试。
该算法在植物满足以下条件时效果最好:
D12和D21满秩。
所有的列都满了吗ω∊<年代pan class="emphasis">R.
是否全部排满ω∊<年代pan class="emphasis">R.
当这些等级条件不成立时,控制器可能会有不期望的特性。如果D12和D21是不是满秩,那么H∞控制器K可能有很大的高频增益。如果后两种秩条件中的任何一种在某个频率上不成立ω,控制器可能在该频率附近有非常轻微的阻尼极点。
兼容性的考虑
参考文献
K.格洛弗和J.C.多伊尔。"所有满足H的稳定控制器的状态空间公式<年代ub>∞规范约束和风险敏感性的关系"系统与控制信函,第11卷,第8期,1988年,167-172页。
[2] Doyle, j.c., K. Glover, P. Khargonekar和B. Francis。“标准H的状态空间解决方案金宝搏官方网站<年代ub>2和H<年代ub>∞控制问题。”自动控制学报,第34卷,第8期,1989年8月,第831-847页。
[3] Safonov, m.g., D.J.N. Limebeer, R.Y. Chiang。“简化H<年代ub>∞通过循环移位、矩阵铅笔和描述概念的理论。”Int。j .来讲。,第50卷,第6期,1989年,第2467-2488页。
P. Pandey, J. Leonhardson,和G. Balas。“对于完整信息和状态反馈问题,最优的、恒定的I/O相似性缩放。”系统与控制信函,第19卷第4期,1992年,第271-280页。
Gahinet, P.和P. Apkarian。用线性矩阵不等式方法求解H<年代ub>∞阀门。”Int。J.鲁棒非线性控制,第4卷,第4期,1994年,421-448页。
T. Iwasaki和R.E. Skelton。“所有H将军的管制员<年代ub>∞-控制问题:LMI存在条件和状态空间公式。自动化, Vol. 30, no . 8, 1994, pp. 1307-1317。
另请参阅
hinfsynOptions|<年代pan itemscope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">augw|<年代pan itemscope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">mixsyn|<年代pan itemscope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">h2syn|<年代pan itemscope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">loopsyn|<年代pan itemscope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">ncfsyn|<年代pan itemscope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">hinffc|<年代pan itemscope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">hinffi
选择网站
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:<年代trong class="recommended-country">.
选择<年代pan class="recommended-country">网站你也可以从以下列表中选择一个网站: