운동학은힘과토크와운동이일어나는원인은고려하지않고운동을하는학문입니다。逆运动学는는방정식을사용원원하는위치에도달하기로봇의의움직임을파악방법방법방법예를들어,자동화된빈피킹작업을하려면하려면제조에서사용되는로봇이빈과빈과기계사이의초기위치에서원하는위치까지정밀움직여야합니다。로봇팔의파지하는부분엔드엔드이펙터로지정됩니다。이구성제한제한범위범위범위구성이가진어떠한조건도위반하지않는않는위치위치의입니다입니다。
원하는로봇의엔드이펙터위치가설정되면되면逆运动学(IK)는엔드이펙터가목표자세로이동하기하기에적합한관절구성을결정할수수한관절구성을결정결정수수한한
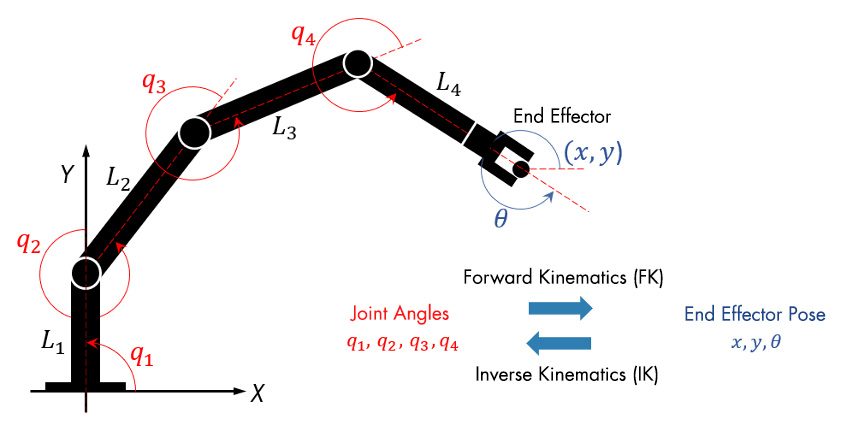
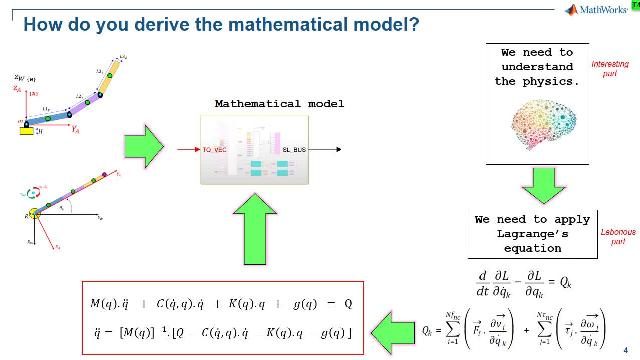
정방향정방향또는逆运动学를사용한로봇의조인트구성구성。
로봇의조인트각도를逆运动学를사용하여계산한후,야코비행렬을사용하여모션프로파일을생성해엔드이펙터를시작자세에서목표자세로이동할수있습니다。야코비행렬은로봇조인트파라미터와엔드이펙터의속도간의관계를정의하도록해줍니다。
정방향운동학(fk)과는달리여러회전조인트가있는로봇은일반적으로으로에복수복수해를를방법방법방법이제안되었습니다이이이이이이이이이이이이이이이이이이이이이이이이이이이이에
수치수치逆运动学해
望각조인트각도는기울기기반과같은최적화을사용하여하여반복적으로계산계산계산계산
수치적ik솔버가더더적으로사용되지만,시스템의비선형성에대한해로수렴여러단계가필요필요반면,해석적ik솔버는한한문제에가장적합적합적합어떤ik솔버를적용할지는주로시간시간대화형에期间
MATLAB을사용한다중DOF로봇로봇逆运动学계산。
机器人系统Toolbox™및simscape multibody™를사용하여ik에대해계산기법을적용할수있습니다있습니다。전체워크플로에는다음과같은이있습니다。
- 강체트리로봇모델생성
- urdf와dh파라미터에서로봇가져오기
- CAD에에정의된된정보를기반으로하여다물체모델모델
- 기하학적야코비행렬계산
- 정방향운동학과동역학동역학逆运动学와동역학분석
- 다중제약조건逆运动学풀기
- 병렬링크메커니즘분석
- 동등한c / c ++코드생성및다른응용프로그램에내장
자세한정보는机器人系统工具箱및simscape multibody.를를하십시오。
해석해석逆运动学해
수학수학을하여,각조인트각도를엔드이펙터의자세에서합니다。ik는조인트파라미터와엔드이펙터자세를심볼을사용해정의으로써으로써는조인트각도에가능한모든해해석적형태연결길이,시작길이,시작자세및회전제약의나타내구할수있습니다。
해석적ik는는주로운동학방정식의비선형성과여유자유도로봇구성대한부족한확장성때문에(DOF)가낮은로봇에사용됩니다
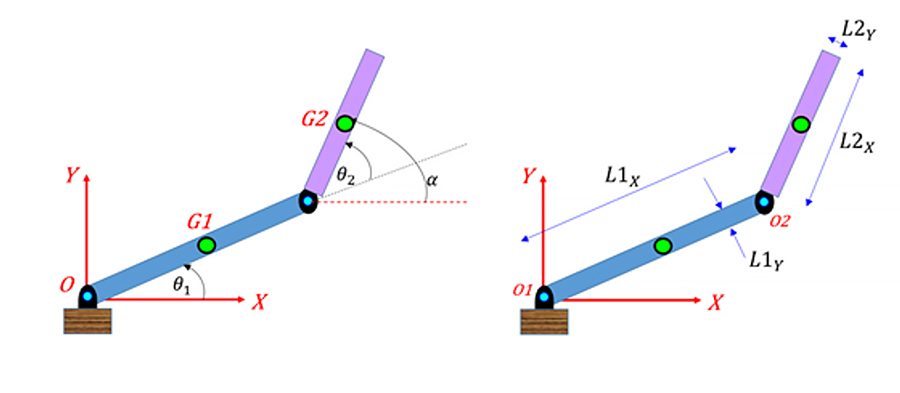
逆运动学해해를계산할수있는조인트θ1,θ2및조인트를갖는2-링크로봇팔。
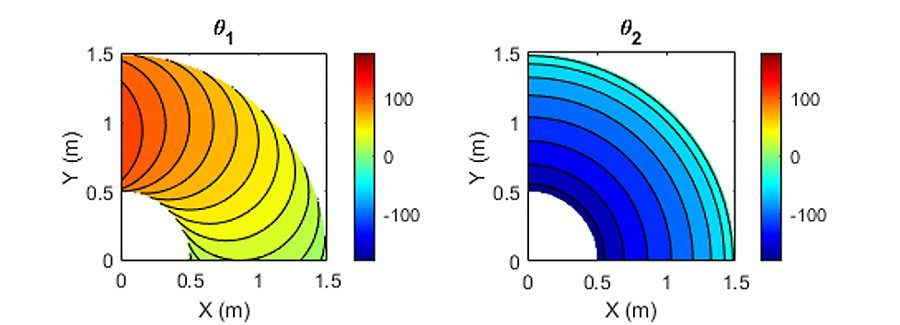
원하는엔드이펙터자세자세조인트각도θ1및θ2에대한해석적逆运动学해。