的朋友
频率特性的数据模型
描述
使用的朋友创建实值或复值频率响应数据模型,或进行转换动态系统模型以频响数据模型形式表示。
频率响应数据模型存储具有相应频率点的复杂频率响应数据。例如,频率响应数据模型H(jw我),存储每个输入频率的频率响应w我,在那里我= 1,…,n.的的朋友模型对象可以表示连续时间或离散时间下的SISO或MIMO频响数据模型。有关更多信息,请参见频率响应数据(FRD)模型.
你也可以使用的朋友创建广义频率响应数据(GENFRD.)模型。
创建
你可以获得的朋友模型以下列方式之一。
的频率响应数据创建模型
的朋友命令。例如,您可以创建的朋友模型采用特定频率的频响数据。例如,请参见SISO频率响应数据模型.
转换一个线性模型,如
SS.模型转换为一个的朋友通过计算模型在指定频率下的频率响应来建立模型。例如,请参见将状态空间模型转换为频率响应数据模型.
使用离线频率响应估计工作流估计模型。这些工作流需要金宝app®控制设计™软件。
有关更多信息,请参见在命令行估计频率响应(金宝app仿真软件控制设计)和使用模型线性化估计频率响应(金宝app仿真软件控制设计).
语法
描述
SYS.=朋友(___,名称,值)
输入参数
特性
对象的功能
下面的列表包含了可以使用的函数的一个代表性子集的朋友模型。一般来说,许多函数适用于动态系统模型也适用于a的朋友对象。的朋友模型不适用任何时域分析函数。
例子
SISO频率响应数据模型
创建一个的朋友对象从频响数据。
对于本例,加载为水箱模型收集的频率响应数据。
负载wtankdata.mat.
该数据包含为频率范围收集的频率响应数据 rad /年代 rad / s。
创建模型。
sys =朋友(响应、频率)
sys =频率(rad / s)的反应 ---------------- -------- 0.0010 - 1.562 e + 01 - 1.9904 0.0018 1.560 e + 01 - 2.0947我0.0034 - 1.513 e + 01 - 3.3670 0.0062 1.373 e + 01 - 5.4306我0.0113 - 1.047 e + 01 - 7.5227我0.0207 - 5.829 e + 00 - 7.6529 0.0379 2.340 e + 00 - 5.6271我e-01 7.765 0.0695 - 3.4188 0.1274 - 2.394 e-01 - 1.9295我e-02 7.216 0.2336 - 1.0648 0.4281 - 2.157 e-02 -连续时间的频率响应。
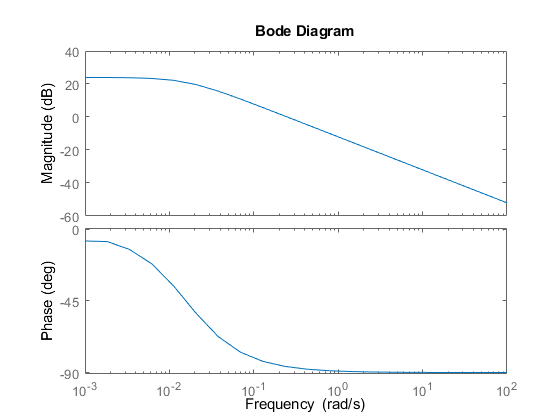
情节SYS..
波德(系统)
离散时间MIMO频响数据模型
对于本例,考虑随机生成的响应数据和频率。
生成一个3 × 2 × 7的复杂阵列和一个频率矢量,有7个点,在0.01和100 rad/s之间。设置样本时间TS.5秒。
Rng (0) r = randn(3,2,7)+1i*randn(3,2,7);w = logspace(2, 2、7);Ts = 5;
创建模型。
sys =朋友(r, w, Ts)
sys =从输入1到:频率(rad / s)输出1输出2 ---------------- -------- -------- 0.0100 0.5377 1.8339 + 0.3129 + 0.3192我0.0464 - -0.4336 + 1.0933我0.3426 + 1.1093 0.2154 0.7254 - 0.0068 -0.0631 1.0000 - 1.4090 - 1.0891 + 1.5326我1.4172 + 0.0326我4.6416 0.4889 - 1.4916 1.0347 - 0.7423 21.5443 - 0.8884 - 0.1924我-1.1471 + 0.8886 100.0000 0.3252 - 0.1774从输入1到:频率(rad/s)输出3 ---------------- -------- 0.0100 -2.2588 - 0.8649i 0.0464 3.5784 - 0.8637i 0.2154 0.7147 - 0.7697i 1.0000 0.6715 + 0.5525i 4.6416 0.7269 - 1.0616i 21.5443 -1.0689 - 0.7648i 100.0000 1.3703 + 1.4193i频率(rad / s)输出1输出2 ---------------- -------- -------- 我0.0100 0.8622 - 0.0301 0.3188 - 0.1649 0.0464 - 2.7694 + 0.0774我-1.3499 - 1.2141 0.2154 - -0.2050 + 0.3714我-0.1241 - 0.2256 1.0000 - -1.2075 4.6416 - -0.3034我0.7172 + 1.5442 + 1.1006 + 2.3505我0.2939 - 0.6156 21.5443 -0.8095 - 1.4023 -2.9443 - 1.4224 100.0000 - -1.7115 + 0.2916我-0.1022+ 0.1978i From input 2 to: Frequency(rad/s) output 3 ---------------- -------- 0.0100 -1.3077 + 0.6277i 0.0464 3.0349 - 1.1135i 0.2154 1.4897 + 1.1174i 1.0000 1.6302 + 0.0859i 4.6416 -0.7873 + 0.7481i 21.5443 1.4384 + 0.4882i 100.0000 -0.2414 + 1.5877i Sample time: 5 seconds Discrete-time frequency response.
指定的数据产生两个输入,三个输出的朋友模型。
具有继承属性的频率响应数据模型
对于此示例,创建具有从传输函数模型继承的属性的频率响应数据模型。
创建传递函数sys1与TimeUnit属性设置为'分钟'和InputDelay属性设置为3。
numerator1 = (2,0);denominator1 = (1 8 0);sys1 =特遣部队(numerator1 denominator1,“TimeUnit”,'分钟',“InputDelay”3)
* --------- s^2 + 8s连续时间传递函数。
propValues1 = {sys1.TimeUnit, sys1.InputDelay}
propvalues1 =1×2单元阵列{“分钟”}{[3]}
创建一个的朋友具有属性的模型sys1.
Rng (0) response = randn(1,1,7)+1i*randn(1,1,7);w = logspace(2, 2、7);sys2 =朋友(响应,w, sys1)
SYS2 =频率(RAD /分钟)响应------------------------ 0.0100 0.5377 + 0.3426I 0.0464 1.8339 + 3.5784I 0.2154 -2.2588 + 2.7694i 1.0000 0.8622 - 1.3499i 4.6416 0.3188 + 3.0349i 21.5443 -1.3077 + 0.7254i 100.0000 -0.4336 - 0.0631i Input delays (minutes): 3 Continuous-time frequency response.
propValues2 = {sys2.TimeUnit, sys2.InputDelay}
propvalues2 =1×2单元阵列{“分钟”}{[3]}
观察到的的朋友模型sys2具有相同的性质sys1.
为频率响应数据模型指定状态和输入名称
对于本例,加载为水箱模型收集的频率响应数据。
负载wtankdata.mat.
该模型有一个输入,电压,和一个输出,水高度。
创建一个的朋友模型,指定输入和输出名称。
sys =朋友(响应、频率、“InputName”,“电压”,'outputname',“高度”);
绘制频率响应。
波德(系统)

输入和输出名称显示在Bode图中。在处理MIMO系统的响应图时,为输入和输出命名可能很有用。
将状态空间模型转换为频率响应数据模型
对于此示例,计算的朋友模型的状态空间模型如下:
使用状态空间矩阵创建状态空间模型。
a = [-2 -1; 1 -2];b = [1 1; 2 -1];c = [1 0];d = [0 1];LTISYS = SS(A,B,C,D);
转换状态空间模型ltiSys到一个的朋友用于频率在0.01和100 rad/s之间的模型。
w = logspace (2, 2, 50);sys =朋友(ltiSys w);
比较频率响应。
波德(ltiSys'B'系统,“r——”)

答案是相同的。
频率响应数据模型阵列
创建数组的朋友模型,您可以指定频率响应数据的多维数组。
例如,当您将响应数据指定为大小为[纽约νNFS1......桑时,函数返回aS1-By -...-桑的数组的朋友模型。每个模型都有纽约输出,ν输入,NF频率点。
在0.1和10 rad/s之间的10个频率点上生成一个2 × 3的随机响应数据阵列,具有一个输出,两个输入模型。
10 w = logspace (1, 1);r = randn(1、2、10 2 3)+ 1我* randn(1、2、10、2、3);sys =朋友(r, w);
从模型数组中提取索引(2,1)处的模型。
SYS21 = SYS(::,:2,1)
sys21 =从输入1:频率输出1 (rad / s) ---------------- -------- 0.1000 - 0.6715 + 0.0229我0.1668 0.7172 - 1.7502 0.2783 - 0.4889 - 0.8314我0.4642 0.7269 - 1.1564 0.7743 0.2939 - 2.0026 1.2915 - 0.8884 + 0.5201我2.1544 -1.0689 - 0.0348 3.5938 - -2.9443 5.9948 - 0.3252 - 0.7145 + 1.0187我我从输入2到10.0000 - 1.3703 - 0.2248:输出频率(rad / s) 1 ---------------- -------- 我0.1000 -1.2075 - 0.2620 0.1668 - 1.6302 0.2783 - 1.0347 - 0.9792 - 0.2857我0.4642 -0.3034 - 0.5336 0.7743 - -0.7873 + 0.9642我1.2915 -1.1471 - 0.0200 2.1544 - -0.8095 - 0.7982我3.5938 1.4384 - 0.1332 5.9948 - -0.7549 10.0000 - -1.7115 - 0.5890 + 1.3514我连续时间频率响应。
负频率的频率响应数据模型
你可以在一个frd对象中指定负频率值。当您希望捕获具有复杂系数的模型的频率响应数据时,此功能非常有用。
创建一个具有正负值的频率矢量。
w0 =排序([-logspace (2, 2, 50) 0 logspace (2, 2, 50)]);
创建一个具有复杂系数的状态空间模型。
一个=[-3.50,-1.25 - -0.25;2、0];B = (1, 0);C = (-0.75 - -0.5, 0.625 - -0.125);D = 0.5;Gc = ss (A, B, C, D);
在指定的频率将模型转换为frd模型。
sys =朋友(Gc, w0);
绘制模型的频率响应图。
波德(Gc,'B'系统,“r——”)

情节反应非常吻合。该图显示了复系数模型的两个分支,一个为正频率,有一个右箭头,另一个为负频率,有一个左箭头。在两个分支中,箭头表示频率增加的方向。
你也可以从以下列表中选择一个网站:
