惯性传感器融合
IMU和GPS传感器融合,以确定方向和位置
使用惯性传感器融合算法来估算方向和位置随时间。该算法被用于不同的传感器配置,输出要求,和运动约束优化。要了解更多关于惯性传感器融合算法及其用途,请参阅找准定位使用惯性传感器和使用惯性传感器和GPS确定姿态。
功能
主题
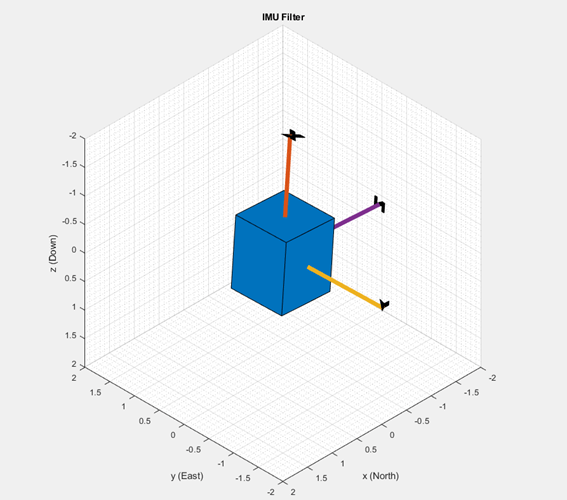
该示例示出了如何使用6轴和9轴融合算法来计算方位。
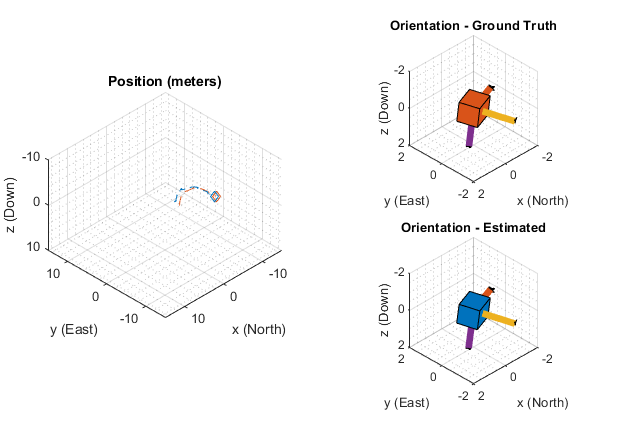
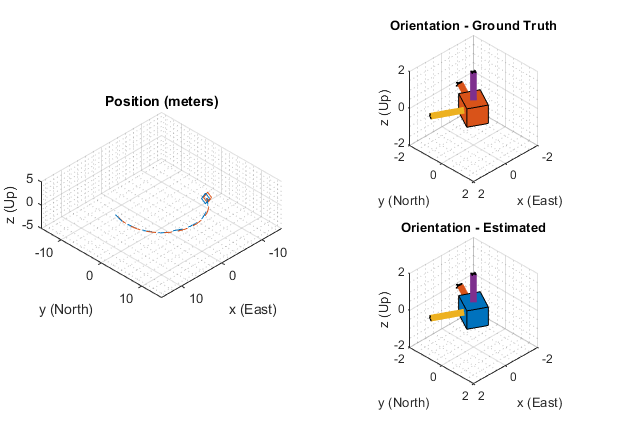
使用卡尔曼滤波器融合IMU和GPS读数来确定姿态。
这个例子展示了如何对准和预处理记录传感器数据。
精选示例

您还可以选择从下面的列表中的网站: