GGIWphd.
伽玛高斯逆Wishart (GGIW) PHD滤波器
描述
这GGIWphd.对象是一个过滤器,实现的概率假设密度(PHD)使用Gamma高斯逆- wishart组件的混合物。PHD过滤器的GGIW实现通常用于跟踪扩展对象。一个扩展对象可以在每个传感器上产生多个检测,GGIW滤波器使用随机矩阵模型来解释这些检测的空间分布。该过滤器由三个分布组成,以表示扩展对象的状态。
高斯分布 - 表示扩展对象的运动状态。
伽玛分布 - 表示来自扩展对象的传感器上的预期检测次数。
逆wishart (IW)分布-表示目标的空间范围。在二维空间中,区段用一个2 × 2的随机正定矩阵表示,它对应于二维椭圆描述。在三维空间中,范围用一个3 × 3的随机矩阵表示,对应于一个三维椭球体描述。这些随机矩阵的概率密度是一个逆wishart分布。
笔记
GGIWphd.对象不兼容trackerGNN那trackerjpda.,trackertomht.系统对象。
创建
描述
博士学位= ggiwphdGGIWphd.使用默认属性值进行筛选。
博士学位= ggiwphd (StateCovariances)状态和StateCoverces.密度每个组分的高斯分布。状态和StateCoverces.设置相同名称的属性。
博士= ggiwphd (StateCovariances,名称,值)
特性
对象功能
例子
创建带有两个3d组件的ggiwphd过滤器
创造A.GGIWphd.过滤有两个3-D恒速分量。两个组分的初始状态分别是[0; 0; 0; 0; 0; 0]和[1; 0; 1; 0; 1; 0]。这两个组件都具有等于1的位置协方差和等于100的速度协方差。默认情况下,GGIWphd.为每个组件创建三维范围矩阵。
= [零(6,1),[1; 0; 1; 0; 1; 0]];cov1 = diag([1 100 1 100 1 100]);covariarces = cat(3,cov1,cov1);PHD = GGIWPHD(州,CoviRARCE,“StateTransitionFcn”,@ constvel,......'stateTransitionJacobianfcn',@ constveljac,......'measurementfcn',@ cvmeas,'measurementjacobianfcn'@cvmeasjac,......'processnoise',眼睛(3),“HasAdditiveProcessNoise”假的,......'positionIndex', 1, 3, 5);
指定区段信息。
DOFS = [21 30];scalematrix1 = 13 * diag([4.7 1.8 1.4]。^ 2);scalematrix2 = 22 * diag([1.8 4.7 1.4]。^ 2);scalematrices = cat(3,scalematrix1,scalematrix2);phd.degreesoffreedom = DOF;phd.scalematrices = scalematrices;phd.extentrotationfcn = @(x,dt)眼睛(3);预测期间没有旋转
预测过滤器0.1秒。
预测(博士,0.1);
指定检测时间为0.1秒。过滤器在当前扫描中接收10个检测。
检测=细胞(10,1);RNG(2018);%可重复结果为了i = 1:10 detections{i} = objectDetection(0.1,randi([0 1]) + randn(3,1));结尾phd.detections =检测;
选择两个检测单元并计算其可能性。
detectionIDs = false (10, 2);detectionIDs([1 3 5 7 9],1) = true;detectionIDs([2 4 6 8 10],2) = true;detectionIDs lhood =可能性(博士)
lhood =2×21.5575 -0.3183 0.1513 -0.7616
用两个检测单元和相关的可能性校正滤波器。
正确(PHD,DetectionIds,Exp(矩)./总和(exp(lohe),1));博士
博士= ggiwphd属性:状态:[6 x4双]StateCovariances: [6 x6x4双]PositionIndex: x1双[3]StateTransitionFcn: @constvel StateTransitionJacobianFcn: @constveljac ProcessNoise: [3 x3双]HasAdditiveProcessNoise: 0形状:[6 6 6 6]:[2 2 2 2]GammaForgettingFactors: [1 1 1 1] DegreesOfFreedom:[25.9870 34.9780 25.9870 34.9780] ScaleMatrices: [3x3x4 double] ExtentRotationFcn: @(x,dT)eye(3) TemporalDecay: 100 Weights:[0.8032 0.1968 0.6090 0.3910]标签:[0 00 0]检测:{1x10 cell}测量fcn: @cvmeas测量jacobianfcn: @cvmeasjac HasAdditiveMeasurementNoise: 1
合并过滤器中的组件。
合并(博士,5);博士
@constveljac ProcessNoise: [3x3 double] HasAdditiveProcessNoise: 0 Shapes: [6 6.0000] Rates: [2 2] gammaforgeingfactors: [1 1] degreesoff自由度:[25.9870 34.9780] ScaleMatrices: [3x3x2 double] ExtentRotationFcn: @(x,dT)eye(3) TemporalDecay: 100 Weights:[1.4122 0.5878]标签:[0 0]检测:{1x10 cell}测量fcn: @cvmeas测量jacobianfcn: @cvmeasjac HasAdditiveMeasurementNoise: 1
提取状态估计和检测。
targetstates =提取物(phd,0.5);tstates = targetstates.state.state.
tStates =6×10.1947 0.9733 0.8319 4.1599 -0.0124 -0.0621
d = [检测{:}];测量= [d.measurement];
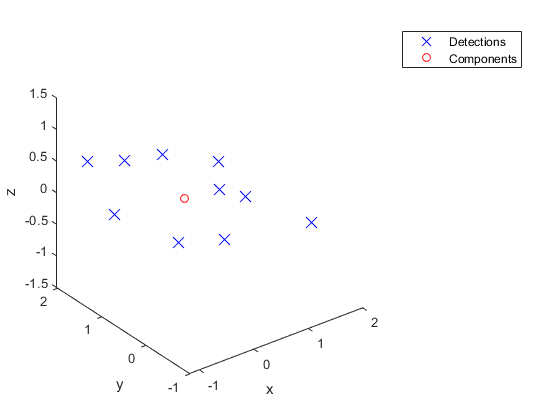
可视化结果。
图()plot3(测量(1:),测量(2:),测量(3:)“x”那“MarkerSize”10,“MarkerEdgeColor”那'B');持有在;: plot3 (tStates (1), tStates (3:), tStates (5:)'ro');Xlabel(“x”) ylabel (“y”) zlabel (“z”) 传奇(“检测”那“组件”)
参考文献
[1] Granstorm,K.和O. Orguner。“使用随机矩阵跟踪多个扩展目标的PHD滤波器。”IEEE信号处理汇刊。卷。60,数字11,2012,pp。5657-5671。
[2] Granstorm, K.和A. Natale, P. Braca, G. Ludeno和F. Serafino。利用x波段海上雷达数据进行扩展目标跟踪的伽玛高斯逆Wishart概率假设密度地质科学和遥感的IEEE交易。卷。53,第12,2015,第6610页,第6617-6631。
扩展能力
你也可以从以下列表中选择一个网站: