坡度GydF4y2Ba
标量函数的梯度矢量GydF4y2Ba
句法GydF4y2Ba
描述GydF4y2Ba
坡度(GydF4y2Ba找到标量函数的渐变向量GydF4y2BaFGydF4y2Ba那GydF4y2BaV.GydF4y2Ba)GydF4y2BaFGydF4y2Ba关于矢量GydF4y2BaV.GydF4y2Ba在笛卡尔坐标。GydF4y2Ba
如果您未指定GydF4y2BaV.GydF4y2Ba, 然后GydF4y2Ba梯度(f)GydF4y2Ba找到标量函数的渐变向量GydF4y2BaFGydF4y2Ba关于从中发现的所有符号变量构造的向量GydF4y2BaFGydF4y2Ba。此向量中的变量顺序由GydF4y2BaSymvar.GydF4y2Ba。GydF4y2Ba
例子GydF4y2Ba
找到功能的梯度GydF4y2Ba
函数的梯度GydF4y2BaFGydF4y2Ba关于矢量GydF4y2BaV.GydF4y2Ba是第一部分衍生物的矢量GydF4y2BaFGydF4y2Ba关于每个元素GydF4y2BaV.GydF4y2Ba。GydF4y2Ba
找到渐变向量GydF4y2Baf(x,y,z)GydF4y2Ba关于矢量GydF4y2Ba[x,y,z]GydF4y2Ba。梯度是带有这些组件的向量。GydF4y2Ba
syms x y z f = 2 * y * z * sin(x)+ 3 * x * sin(z)* cos(y);梯度(f,[x,y,z])GydF4y2Ba
ans = 3 * cos(y)* sin(z)+ 2 * y * z * cos(x)2 * z * sin(x) - 3 * x * sin(y)* sin(z)2 * y *SIN(x)+ 3 * x * cos(y)* cos(z)GydF4y2Ba
绘制功能的梯度GydF4y2Ba
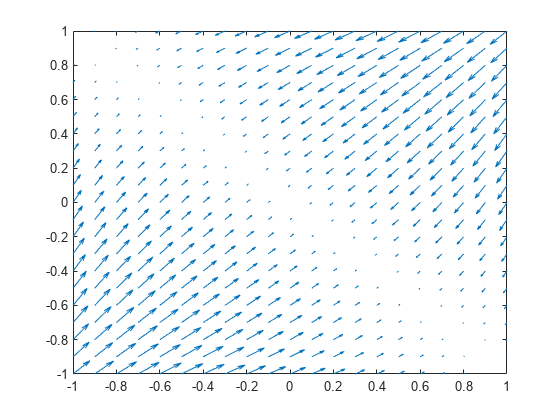
找到函数的渐变GydF4y2Baf(x,y)GydF4y2Ba,并将其作为箭头(速度)图。GydF4y2Ba
找到渐变向量GydF4y2Baf(x,y)GydF4y2Ba关于矢量GydF4y2Ba[x,y]GydF4y2Ba。梯度是矢量GydF4y2BaGGydF4y2Ba使用这些组件。GydF4y2Ba
syms x y f = - (sin(x)+ sin(y))^ 2;g =梯度(f,[x,y])GydF4y2Ba
g = -2 * cos(x)*(sin(x)+ sin(y))-2 * cos(y)*(SIN(x)+ SIN(Y))GydF4y2Ba
现在绘制这些组件定义的矢量字段。马铃薯GydF4y2Ba®GydF4y2Ba提供GydF4y2Ba颤动GydF4y2Ba绘制此任务的函数。该函数不接受符号参数。首先,将符号变量替换为组件的表达式GydF4y2BaGGydF4y2Ba数字值。然后使用GydF4y2Ba颤动GydF4y2Ba:GydF4y2Ba
[x,y] = meshgrid(-1:.1:1,-1:.1:1);g1 =子(g(1),[x y],{x,y});g2 = summ(g(2),[x y],{x,y});quiver(x,y,g1,g2)GydF4y2Ba
输入参数GydF4y2Ba
更多关于GydF4y2Ba
也可以看看GydF4y2Ba
卷曲GydF4y2Ba|GydF4y2Ba差GydF4y2Ba|GydF4y2Ba分歧GydF4y2Ba|GydF4y2Ba黑森西GydF4y2Ba|GydF4y2Ba雅各比亚GydF4y2Ba|GydF4y2Ba拉普拉斯GydF4y2Ba|GydF4y2Ba潜在的GydF4y2Ba|GydF4y2Ba颤动GydF4y2Ba|GydF4y2BaVectorPotential.GydF4y2Ba
在R2011B中介绍GydF4y2Ba
选择一个网站GydF4y2Ba
选择一个网站,以便在可用的地方进行翻译的内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:GydF4y2Ba。GydF4y2Ba
选择GydF4y2Ba网站GydF4y2Ba您还可以从以下列表中选择一个网站:GydF4y2Ba
美洲GydF4y2Ba
- América拉丁GydF4y2Ba(Español)GydF4y2Ba
- 加拿大GydF4y2Ba(英语)GydF4y2Ba
- 美国GydF4y2Ba(英语)GydF4y2Ba
欧洲GydF4y2Ba
- 比利时GydF4y2Ba(英语)GydF4y2Ba
- 丹麦GydF4y2Ba(英语)GydF4y2Ba
- 德意志GydF4y2Ba(德意志)GydF4y2Ba
- España.GydF4y2Ba(Español)GydF4y2Ba
- 芬兰GydF4y2Ba(英语)GydF4y2Ba
- 法国GydF4y2Ba(Français)GydF4y2Ba
- 爱尔兰GydF4y2Ba(英语)GydF4y2Ba
- 意大利GydF4y2Ba(意大利语)GydF4y2Ba
- 卢森堡GydF4y2Ba(英语)GydF4y2Ba
- 荷兰GydF4y2Ba(英语)GydF4y2Ba
- 挪威GydF4y2Ba(英语)GydF4y2Ba
- Österreich.GydF4y2Ba(德意志)GydF4y2Ba
- 葡萄牙GydF4y2Ba(英语)GydF4y2Ba
- 瑞典GydF4y2Ba(英语)GydF4y2Ba
- 瑞士GydF4y2Ba
- 英国GydF4y2Ba(英语)GydF4y2Ba
亚太地区GydF4y2Ba
- 澳大利亚GydF4y2Ba(英语)GydF4y2Ba
- 印度GydF4y2Ba(英语)GydF4y2Ba
- 新西兰GydF4y2Ba(英语)GydF4y2Ba
- 中国GydF4y2Ba
- 日本语GydF4y2Ba(日本语)GydF4y2Ba
- 한국GydF4y2Ba(한국어)GydF4y2Ba