多体的Simscape
マルチボディ機械システムのモデル化とシミュレーション
Simscape多体™(以前はSimMechanics™)は,ロボット,車両サスペンション,建設機器,および航空機着陸装置などの3 d機械システムのためのマルチボディシミュレーション環境を提供します。ボディ,ジョイント,拘束,力要素,およびセンサーを表すブロックを使用して,マルチボディシステムをモデル化できます.Simscape多体は,完全な機械システムの運動方程式を定式化し解を解きます。すべての質量,慣性,ジョイント,拘束,および3 d形状を含む完全なCADアセンブリをモデルにインポートできます。自動的に生成された3 dアニメーションを使用すると,システムのダイナミクスを視覚化できます。
多体的Simscapeは,制御システムの开発と,システムレベルでのパフォーマンスのテスト作业を支援します。MATLAB®変数および式を使ってモデルをパラメーター化し,金宝appSimulink的®でマルチボディシステムの制御システムを設計できます.Simscape™製品ファミリのコンポーネントを使用して,油圧、電気,空気圧、およびその他の物理システムをモデルに統合できます。ハードウェアインザループ(边境)システムを含むその他のシミュレーション環境へモデルを展開するため,Simscape多体ではCコード生成をサポートしています。
始める:
剛体および柔軟な3 dパーツ
パラメーター化された3 dジオメトリまたはCADデータを使用して,剛体および柔軟なパーツを定義します.MATLABで2 dプロファイルを作成し,それらを線に沿って押し出し成形するか,またはそれらを軸の周りに回転させます。材料特性を指定するか,有限要素ソフトウェアからインポートします。
ジョイントと拘束
パーツをジョイントで接続し,自由度を定义します。设计では,ラックギア,ピニオンギア,ベベルギア,プーリをケーブルで接続してください。ローラーコースター,リニアコンベヤー,およびカスタムキネマティック挙动のある类似のシステムをモデル化します。
接触力
3 dパーツ間の衝突と摩擦力をモデル化します。カスタムな空気力学的および流体力学的力を追加します。宇宙システムのための重力を含みます。

ロボットの足と床との間の接触力には,衝突力および摩擦力が含まれます。
作动システムを含めます
電子,油圧、空気圧、およびその他のシステムを3 dメカニカルモデルに直接接続します。アプリケーションのアクチュエーター技術を評価し,性能要件を満たすために必要なサイズおよび電力を決定します。
制御アルゴリズムの设计
複雑な制御戦略を実行するために,高度な線形化および自動制御チューニング技術を使用します。ロバスト性および時間応答目標を達成するようなコントローラーゲインを迅速に見つけ出します。システムパフォーマンスの評価のためにソフトウェア実装をテストします。

补助翼が指令された角度を追迹するための制御システム
设计チームを一つに
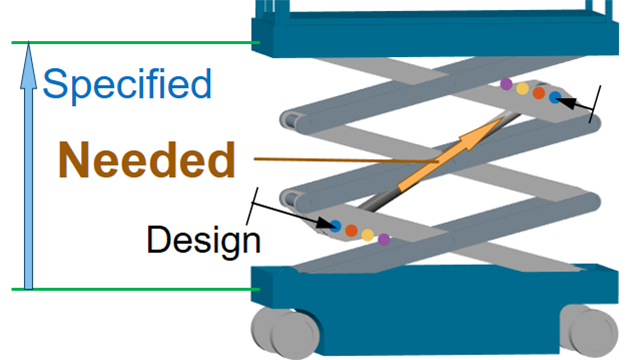
全体システムの仕様が実行可能になることで,設計プロセスの早期にソフトウェアプログラマーとハードウェア設計者の共同作業を可能にします。シミュレーションを使用して,設計空間全体を詳細に調べます。

制御ロジックがロボットアームと2つのコンベアベルトを调整して,パッケージを运んで整列。
设计スペースの迅速な探索
長さ,半径,質量,電圧などの設計パラメーターを自動的に変化させます。設計スペースの実行可能な部分を特定し,開発作業を集中させるために,テストを迅速に並行して実行します。

最適化アルゴリズムは,先端が必要な軌道をたどるまで,リンク機構の長さを調整します。
要件の改善
基本パラメーターを持つ抽象モデルを使用して,開発プロセスの初期に設計をテストします。未知数を計算して,詳細な仕様を作成します。動的シミュレーションを使用して,より少ない反復で機械的設計を完了します。

抽象設計は,CADにおいて詳細設計が実行される前に調整されます。
モデル再利用の拡大
主要なパラメーターをモデルユーザーに公开するモデルのライブラリを开発します。パラメーターを変更するだけで,多くの制品固有の设计にわたり泛用アクチュエーターモデルを再利用できます。复数の制品ラインにまたがるコアセットのシミュレーションモデルを用いて,企业の效率性を高めます。

泛用油圧アクチュエーターの再利用
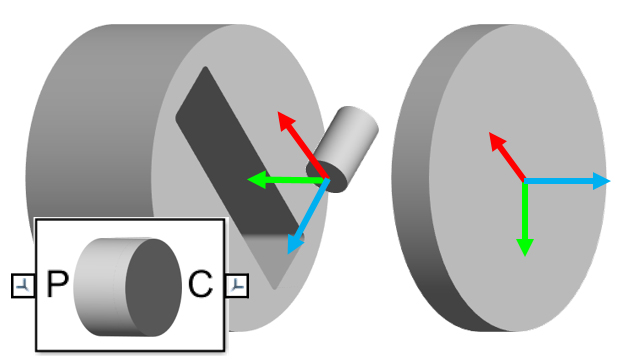
ジョイントのあるアセンブリのインポート
质量,惯性,および色を有するすべての部品を含むCADアセンブリ全体が,嵌合接続および接合接続とともに,的Simscapeモデルに自动的に変换されます。既存のCADパーツに対する更新は,的Simscapeモデルにマージすることができます。

的SimscapeでCADパーツおよびアセンブリを再利用するオプション。
ネイティブCADデータの読み取り
CATIA®克里奥™,发明家®, NX™,Solid Edge®,扎实的作品®,および参数化实体®からファイルを直接参照することによってパーツを定義します。パーツは,一步®,STL,SAT,またはJTなど,3Dモデリングのためのファイル形式を参照することによって指定することもできます。

Simscapeモデルで使用する個々のパーツのCADファイルを直接参照します。
3 dで編集
3 dインターフェースを使用して,パーツ上のフレームを定義し,調整します。頂点,エッジ,サーフェス,またはボリュームをグラフィカルに選択して,感知,ジョイント接続,および力の印加に使用することができるフレームの位置および向きを定義します。

Simscape多体3 dインターフェースを使用して,パーツに接続ポイントを追加します。
ロバスト設計を作成
时间,负荷,または温度ベースの条件など,コンポーネントにおける障害の基准を设定します。磨耗したギアの歯や轴受摩擦の増加など,劣化したコンポーネントの挙动をモデル化します。自动的にモデルを设定し,效率的に障害条件に対して设计を検证します。

2つのパーツ间の接続は,力が継手の上限を超えると壊れます。
予知保全の実行
データを生成して,予知保全アルゴリズムを学習させます。通常または異常時のシナリオで仮想テストを使用してアルゴリズムを検証します。保守が適切な間隔で行われるようにすることで,ダウンタイムと機器のコストを削減します。

种々の故障の组合せを検出するマルチクラス分类器を开発するために使用した,漏れ,ブロッキング,および轴受障害がある3重往复ポンプモデル。
損失を最小化
機械部品によって消費される電力を計算します。コンポーネントが安全動作領域内で動作していることを確認します。特定のイベントとテストシナリオのセットをシミュレートし,MATLABで後処理結果を作成します。

歯の摩擦および軸受の動力損失を伴うウォームギア。
シミュレーション结果のアニメーション
モデルより自動的に生成された3 dビジュアルとシミュレーション結果のアニメーションを使用して,システムを分析します。複数の角度から同時にアニメーションを表示し,ビデオファイルをエクスポートします。

3 dでメカニズムの探索
3Dインターフェースでメカニズムを探索し,模式図にナビゲートして,モデル构造を検证し,プロットされた结果を调べます。カスタム参照フレームからシミュレーション结果を表示するために,静的または移动する视点を定义します。

メカニズムの动作,アセンブリ定义,およびシミュレーション结果を探索します。
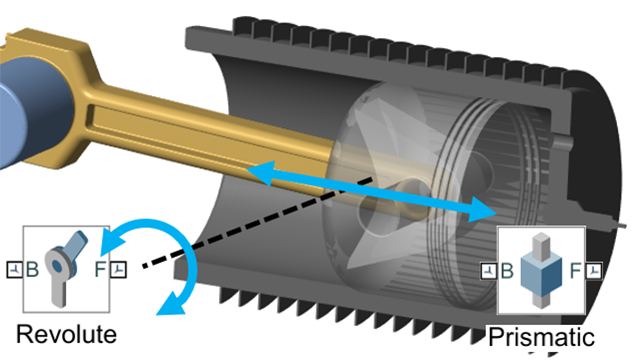
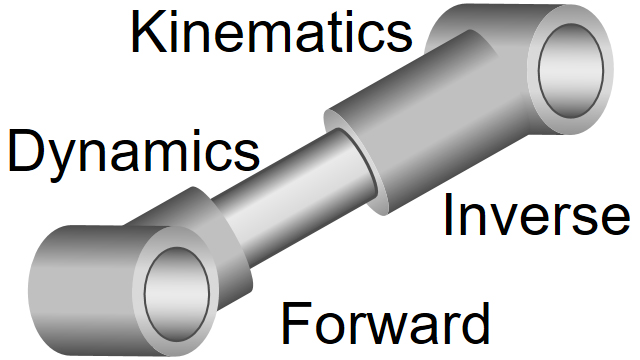
必要な負荷の計算
順動力学,逆動力学,順運動学,逆運動学など,さまざまなタイプの分析を実行します。作动自由度と运动自由度が一致しない场合であっても,必要な运动を生じさせるために必要な力またはトルクを计算します。
ハードウェアプロトタイプなしでのテスト
的Simscape多体のモデルをÇコードに変换し,dSPACE的®,的Speedgoat,OPAL-RT,および他のリアルタイムシステムでのハードウェアインザループテストを使用して,组み込み制御アルゴリズムをテストします。生产システムのデジタルツインを使用してテストを构成することによって,仮想试运転を行います。
并列シミュレーションによる高速な最适化
的Simscape多体モデルをÇコードに変换して,シミュレーションを高速化します0.1台のマシン上の复数のコア,计算クラスター内の复数のマシン,またはクラウド上にシミュレーションを展开することによって,テストを并列実行します。

并列演算を使用し,最小の电力消费用のロボットの経路
他のチームとのコラボレーション
各的Simscapeアドオン制品のライセンスを购入しなくても,的Simscape制品ファミリのすべての拡张コンポーネントや机能などのモデルを调整してシミュレーションできます。保护されたモデルを外部チームと共有して,IPの公开を回避します。

多体的Simscapeモデルは,多体的Simscapeを购入していない他の人と共有することができます。
MATLABによるあらゆるタスクを自動化
MATLABを使用して,モデルアセンブリ,パラメーター化,テスト,データ收集,后处理など,あらゆるタスクを自动化します。エンジニアリング组织全体の效率を高めるために,共通タスク用のアプリを作成します。

MATLABコマンドを用いて構築したSimscape多体の振子モデル。
システム设计を最适化
金宝app仿真软件を使用して,制御アルゴリズム,ハードウェア設計,および信号処理を単一環境に統合します。最適化アルゴリズムを適用して,システムにとって最適な全体設計を見つけます。
开発サイクルを短缩化
確認および検証ツールを使用して,设计の反复回数を削减し,要件が完成して一贯していることを确认します。开発サイクル全体を通じて継続的に検证することで,システムレベルの要件が満たされていることを确认します。

Simscape多体のケーブル拘束を使用したブロックおよびタックルのモデル化。
低次元柔軟固体ブロック
さまざまな形状のボディの変形をモデル化
接触力
CADジオメトリと押出ジオメトリの接触をモデル化し,ゼロクロッシングを使用してシミュレーション速度を向上
ジョイントの解放
ロックされたジョイントを解放し,ボディのアンロック时の动作をモデル化
ジョイントブロックでの動作制限
指定された境界にジョイントの移动を制限
KinematicsSolverの機能強化
速度ベースの运动学解析を実行
慣性センサーブロック
坚固に接続されたボディ要素のグループ,または全体のメカニズムの惯性プロパティーを计测
これらの機能および対応する関数の詳細については,リリースノートを参照してください。
