robótica隐含的描述程序为informáticos,它允许一个机器人进行发射,公式平面,决定发射区域。请允许我们对机器人的程序进行修改autónoma dentro de edifiicio要求detección y percepción, localización y mapeo, planificación y seguimiento de trayectorias,系统控制其他区域。
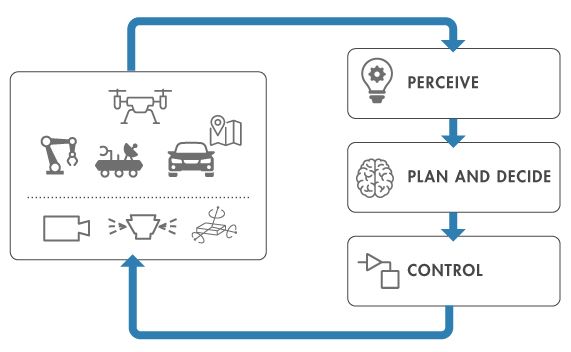
La robótica generalmente imply:
- 有能力的一个机器人,我们可以使用visión人工和深度学习的中间算法detección de objetos, clasificación y seguimiento, y estimación de movimientos
- Proporcionar autonomía一个机器人的中间算法localización y mapeo simultáneos (SLAM), evasión de colisiones y planificación de movimientos
- 机器人的中间控制系统:diseño控制系统,模型的预测控制,电机的计算控制
- 该产品适用于不同的嵌入式平台,包括CPU, GPU, FPGA微控制器
我们的工程师可以在robótica上画一个示意图,我们可以在máquina上画一个示意图,我们可以在机器人前面画一个示意图。También utilization lenguajes de programación como C/ c++, Python®, Java®y MATLAB®机器人操作系统(ROS)在硬件abstracción中描述算法,在硬件配置中描述控制,在硬件transmisión中描述处理过程。
Flujo de trabajo习惯性para proyectos de robótica。
请原谅,如果有一个错误,我们可以把它写在robótica上。modelado y simulación en software ayudan a preir errors de implementación,你可以在原tipado中识别问题,在producción机器人的程序中识别问题,在sería peor aún,在真实世界中利用问题。Simular el sistema también ayuda a los ingenieros a perfeccionar su diseño a jusstando los parámetros de control,这是一个重要的平台,它是机器人的硬件辅助设备。
关于函数积分的MATLAB (robótica)。谢谢,我们可以通过líneas来学习深度学习的算法,我们可以通过MATLAB来学习机器人明确的反对意见.金宝app动态仿真模块®Ofrece bloques predefinidos para modelado y simulación con diseño basado en modelos para robótica。请相信,我们的Simulink允许我们的程序将机器人的传感器和公金宝app共突击队的数据联系起来,我们的程序可以是través,我们的程序可以是código。
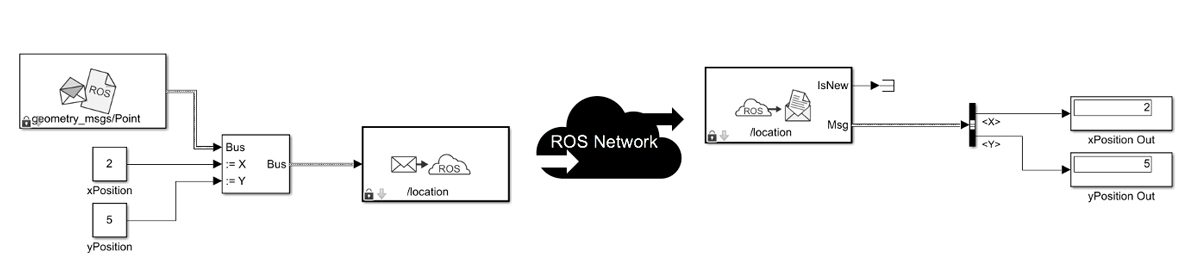
用MATLAB和Simul金宝appink模拟robótica,就可以了Simulación机器人可升级原始的概念模型和形式的定义económica。Luego,你可以用我们的模式来忠实于我们的朋友validación我可以把我们的算法恢复到simulación。我们可以在simulación机器人上得到这个结果,我们可以在código上得到这个结果,我们可以在programación上得到这个结果。金宝app将MATLAB和Simulink连接到一起,并将其应用于c++ direc金宝apptamente的MATLAB和Simulink对机器人的模拟进行验证。
Para obtener más información sobre robótica,咨询机器人系统工具箱™,导航工具箱™,ROS工具箱,MATLABy金宝app.

{kind=link}