场强减弱控制
永磁同步电动机(PMSM)的弱磁控制
电机控制Blockset
设计并实现电机控制算法
弱磁或弱磁是一种以降低转矩为代价,使电动机转速高于额定转速的技术。磁场弱化用于自动化应用的电机控制和电动汽车和机车的牵引电机控制,以实现更高的电机速度时,更低的扭矩是可以接受的。
的永磁同步电机)因其高功率密度、高速度和快速动态响应而在这些应用中得到广泛应用。然而,当定子端电压达到逆变器输出极限时,永磁同步电机的速度受到限制。因此,永磁同步电机需要磁场弱化,以提高其轴转速超过其设计额定值。实现更高电机速度的一种方法是调节逆变电源电子来操纵定子d轴和q轴电流,以抵消转子磁铁产生的磁气隙磁通。
磁场弱化控制包括通过降低与永磁体相关的气隙磁链的影响,来降低产生的d轴磁链,\(\lambda_{d}\)。这是通过在永磁同步电动机中驱动励磁d轴定子电流的负分量来实现的,如下图1所示。
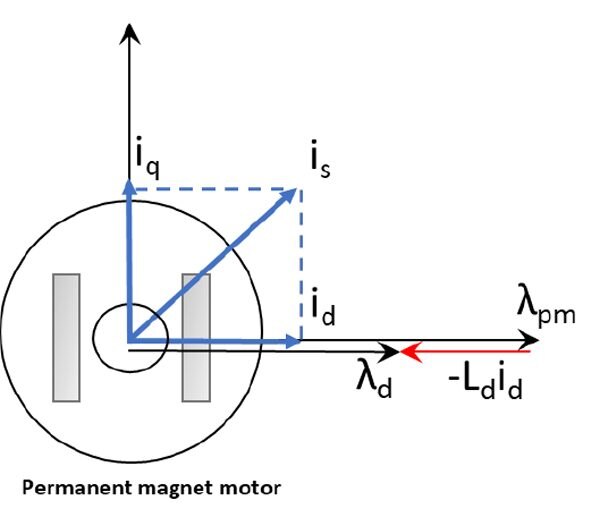
图1 d轴磁通λd的矢量表示
从图2的转矩速度特性曲线可以看出,电机的反电动势(定子电压)随电机转速的增大而增大。这种行为发生在永磁同步电动机的恒转矩区域,其中磁场定向控制(FOC)是一种公认的调节电机的方法。然而,当转速继续上升时,施加电压达到最大值,反EMF电压超过施加电压,阻止电机转速上升。为了使电机速度超过其基本速度,在保持恒定输出功率(扭矩和电机速度的乘积)的同时,使用了弱磁场模式。在磁场减弱期间,电机可以在最大可用电压下更快地旋转,以降低最大扭矩为代价。
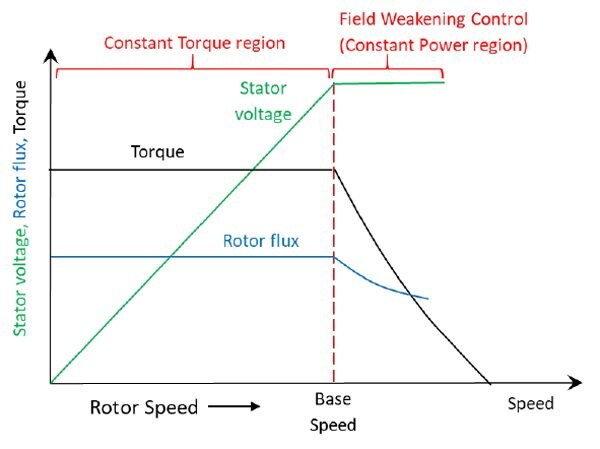
图2永磁同步电动机的转矩和转速特性
图3显示了作为定子电流(i)左侧电压限制椭圆和电流限制圆的交点的弱磁场控制操作d,我问)飞机。
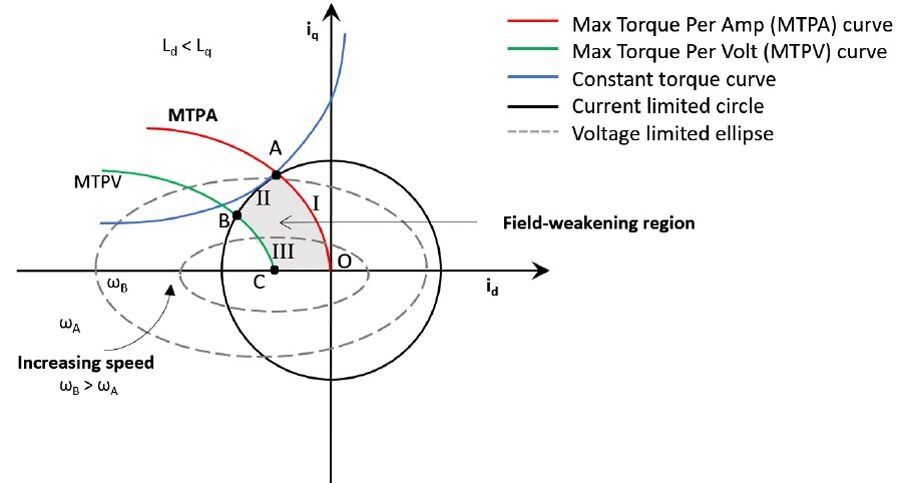
图3 PMSM的电压和电流限制
为了理解弱场,可以使用限制弱场区域OABC的轨迹来评估当前矢量轨迹。沿OA的轨迹I为每安培最大转矩(该项目的)曲线,其中MTPA可通过操纵当前矢量轨迹匹配OA曲线来实现。轨迹II沿着从A到b的电流极限圆,电流极限由直流母线和电力电子的约束定义。轨迹III代表沿BC的深度磁场弱化,即每伏最大扭矩(MTPV)曲线。在MTPV运行过程中,电机在直流母线所限定的电压约束椭圆内产生最大转速和转矩。无论转矩瞬态响应如何,优化的弱磁轨迹或工作点始终处于灰色区域。
图4显示了在系统级的PMSM弱磁场控制框图金宝app®.外速度控制环产生一个扭矩命令作为MTPA磁场减弱控制块的输入。内部电流回路由克拉克和帕克变换和一个空间矢量发电机。
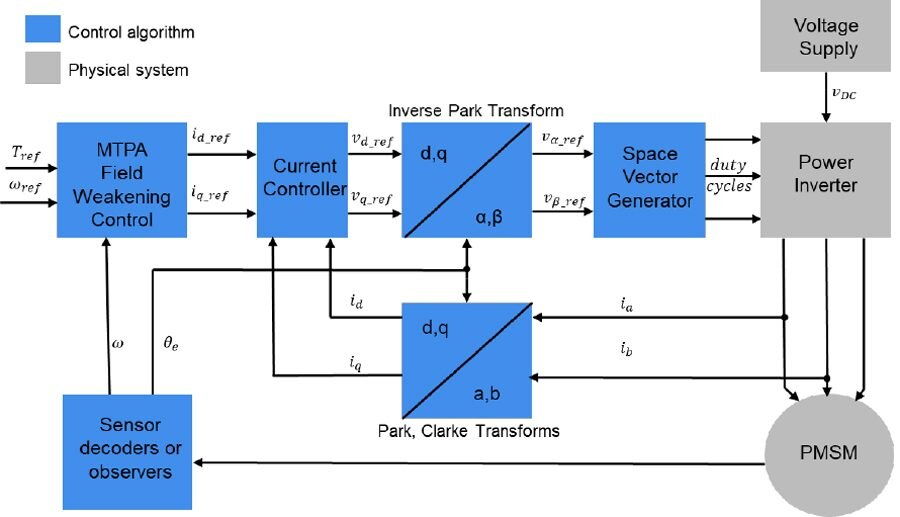
图4永磁同步电机弱磁控制概述
电机控制Blockset™提供参考示例,显示场强减弱控制,以及代码生成部署,以帮助您使用金宝app.
要了解更多关于如何设计和实现电机控制算法,请参阅电机控制Blockset和Simscape电气™.

例子和如何做
软件参考



