采用模型预测控制与传感器融合的自适应巡航控制
Mathworks Melda Ulusoy
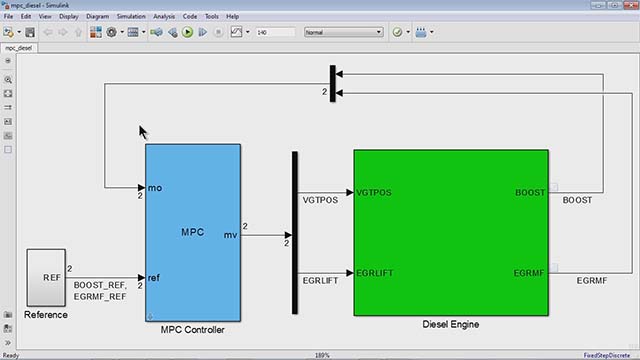
该视频演示了ADAS和自动化驱动系统的MPC应用。您将学习如何模拟结合传感器融合和自适应巡航控制(ACC)的控制系统。使用Simu金宝applink.®您可以使用车辆动态和传感器模拟ACC系统,创建驱动方案,并在闭环中测试控制系统以评估控制器性能。
您可以使用自动化驾驶工具箱™和型号预测控制工具箱™为ADA和自动化驱动系统设计和模拟MPC控制器。自动化驾驶工具箱支持多传感器融合开发,并为模拟道路和金宝app周围汽车提供传感器模型和场景。使用嵌入式编码器®,您可以从Simulink Model自动生成C代码并将其部署以进行软件循环(SIL)测试和硬件实现金宝app。
相关视频和网络研讨会


















您还可以从以下列表中选择一个网站: