主要内容
状态空间控制设计
LQG / LQR和杆子放置算法
状态空间控制的设计方法,如LQG/LQR和极点配置算法,是有用的MIMO设计。
职能
主题
Linear-Quadratic-Gaussian(LQG)控制是一种状态空间技术,允许您借助调节/跟踪器性能和控制工作,并考虑过程干扰和测量噪声。
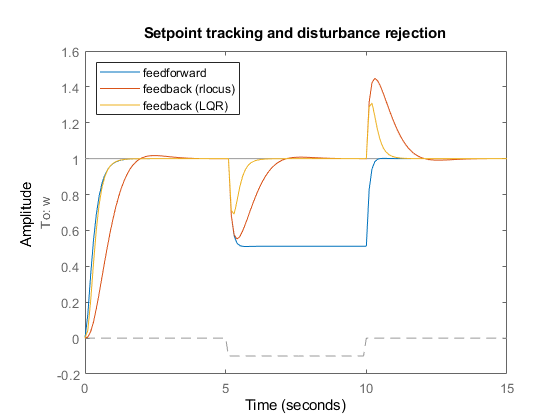
使用线性二次高斯技术来调节钢轧机中的光束厚度。
使用LQG合成设计用于磁盘驱动器读/写头的反馈控制器。
本案例研究说明了经典的设计过程。
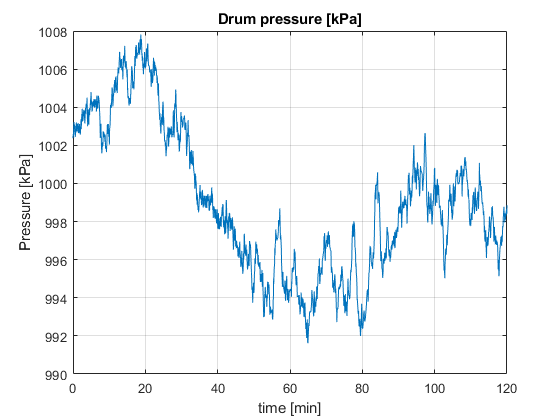
设计用于噪声系统中的植物输出的LQG调节器。
使用卡尔曼州估算器设计LQG伺服控制器。
为Simulink建模的系统设计LQR控制器金宝app®。
闭环杆位置对时响应特性的直接影响,例如上升时间,稳定时间和瞬态振荡。极点放置使用状态空间技术来分配闭环磁极。
特色例子

您还可以从以下列表中选择一个网站:
