模型导入
将多体模型导入Simscape™MultiBody™环境
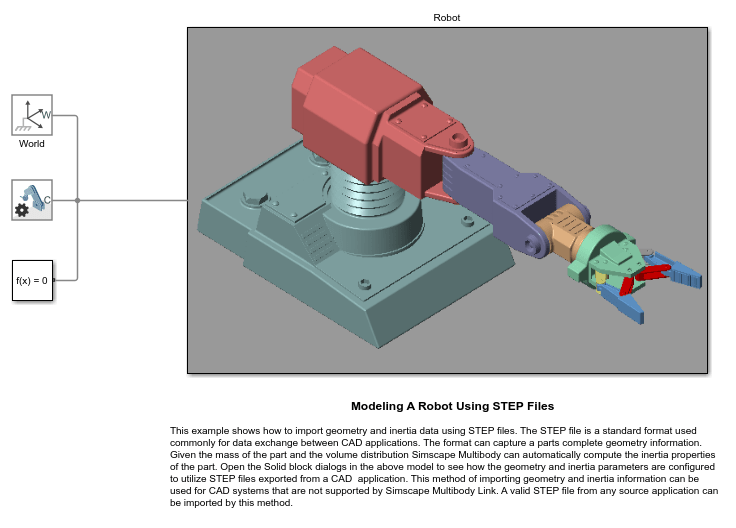
将多体模型导入simscape multibody.环境。使用小运动此任务的功能。您可以导入CAD,URDF和机器人系统工具箱模型。机器人系统工具箱模型需要创建产品许可证。该函数解析模型,提取必要的数据,并使用Simscape多体块为其主体,约束和关节重建组件。
URDF模型必须是URDF文件和机器人系统工具箱模型刚性小组细胞对象。CAD模型必须采用合适的XML格式。使用smexportonshape.函数从inshape软件出口它们。使用Simscape Multibody Link CAD插件进行Autodesk®发明者®,Creo™参数,或SolidWorks®楷模。插件可以自由使用。看看simscape.多体XML Schema.有关来自其他来源的模型的自定义导出应用程序的示例。
功能
smexportonshape. |
导出CAD装配模型onemape.云软件 |
小运动 |
导入CAD,URDF或机器人系统工具箱模型 |
话题
桌面CAD导入
CAD翻译概述,重点是工作流,工具和生成模型。
下载并安装Simscape Multibody Link.CAD导出插件。
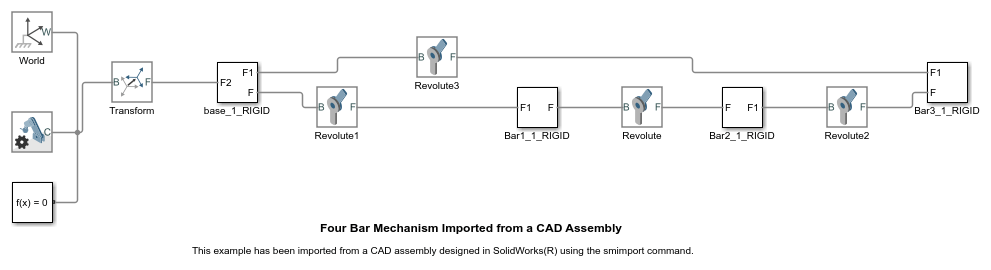
生成的一般步骤simscape multibody.来自XML多体描述文件的模型。
使用小运动功能从多层DODY生成机器人臂模型描述XML文件。
onemape.CAD进口
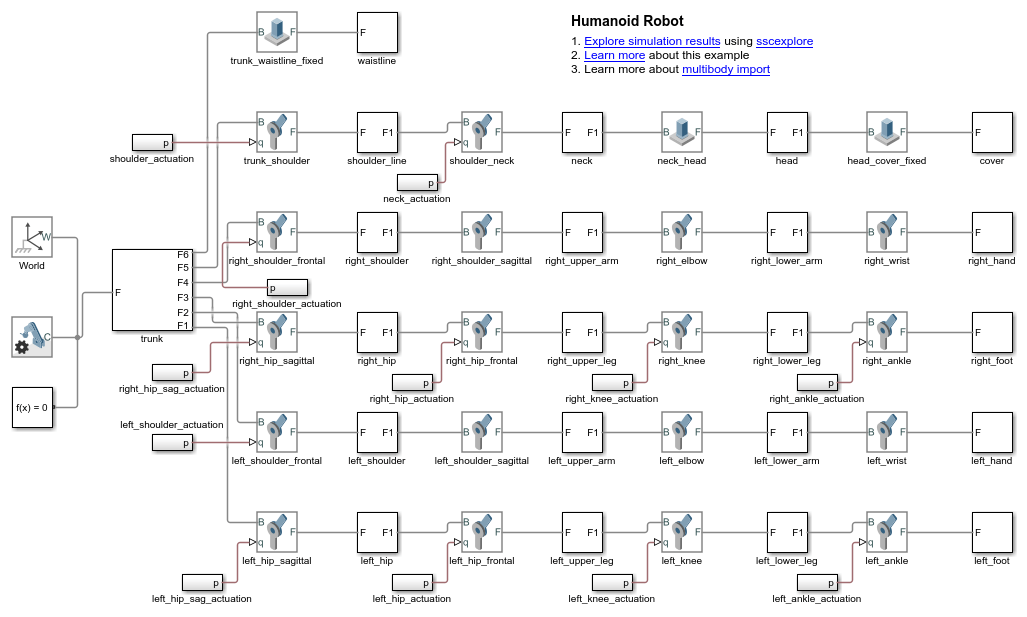
从inshape出口人形机器人®软件并将其导入simscape multibody.软件。
CAD概述从inshape软件导入,重点是导入工作流程,工具和用户身份验证。
urdf进口
从inshape软件导出人形机器人并将其导入simscape multibody.软件。
了解机器人社区中流行的URDF规范,并创建一个简单的URDF模型,供以后导入simscape multibody.环境。
导入URDF模型。映射URDF实体simscape multibody.块。一个简单的URDF导入示例。
特色例子
您还可以从以下列表中选择一个网站: