removeConstraints
描述
removeConstraints (对象的最后一个索引处存储的约束viztree)约束的属性interactiveRigidBodyTree对象,viztree。
例子
交互式构建和回放系列机器人配置
使用interactiveRigidBodyTree对象在图形中手动移动机器人。该物体使用图中的交互式标记来跟踪不同刚体的所需姿态rigidBodyTree对象。
负载机器人模型
使用loadrobot函数访问所提供的机器人模型rigidBodyTree对象。
机器人=装载机器人(“阿特拉斯”);
可视化机器人和保存配置
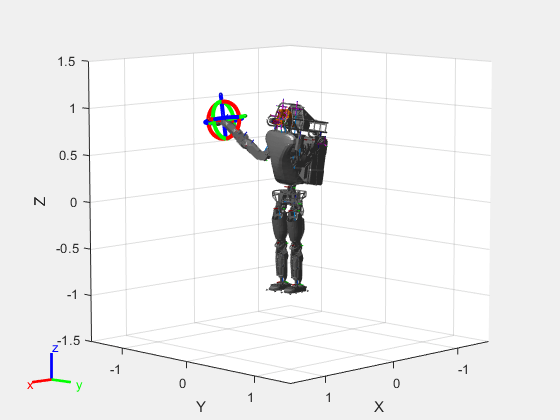
创建一个交互式树对象和相关图形,指定加载的机器人模型和它的左手作为末端执行器。
viztree = interactiveRigidBodyTree(机器人,“MarkerBodyName”,“l_hand”);
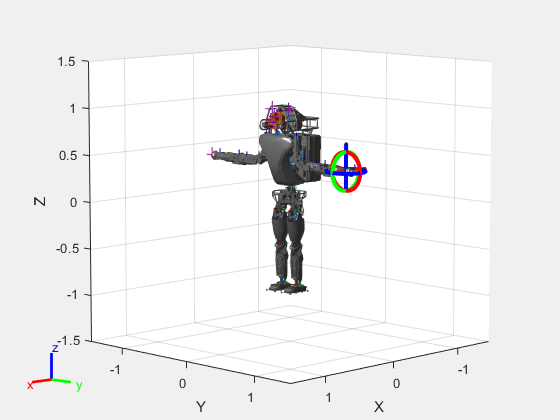
点击并拖动交互标记来更改机器人配置。您可以单击并拖动任意轴进行线性运动,使用红色、绿色和蓝色圆圈绕轴旋转主体,并拖动交互式标记的中心以在3-D空间中定位它。
的interactiveRigidBodyTree对象使用逆运动学来确定实现所需末端执行器姿态的配置。如果相关刚体不能到达标记点,则图形从逆运动学求解器中呈现最佳构型。
以编程方式设置当前配置。对象中非固定关节的数目RigidBodyTree到配置财产。
currConfig = homeConfiguration(viztree.RigidBodyTree);currConfig(1:10) = [0.2201 -0.1319 0.2278 -0.3415 0.4996 .…0.0747 0.0377 0.0718 -0.8117 -0.0427]';viztree。配置= currConfig;
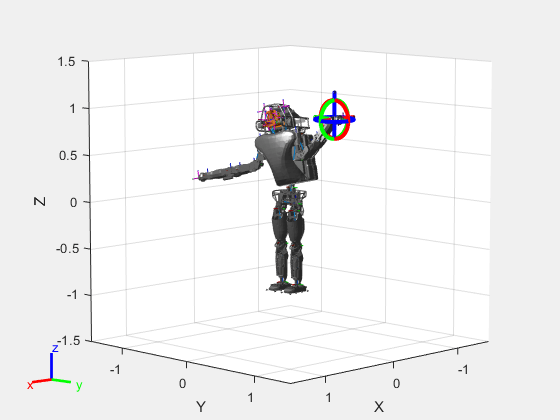
中保存当前机器人配置StoredConfigurations财产。
addConfiguration (viztree)
若要将末端执行器切换到不同的刚体,请右键单击图中所需的刚体并选择将主体设置为标记体。使用此过程选择右手框架。
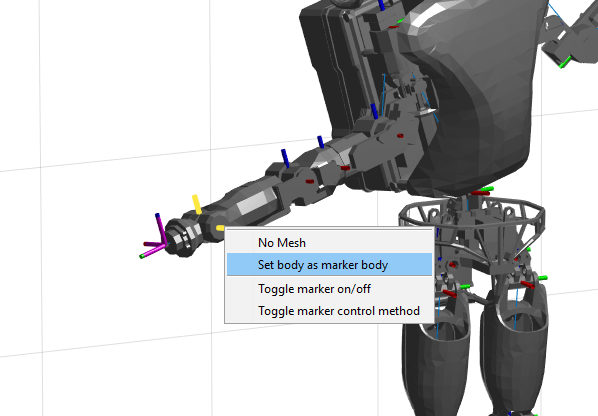
您还可以设置MarkerBodyName属性设置为特定的主体名称。
viztree。MarkerBodyName =“r_hand”;
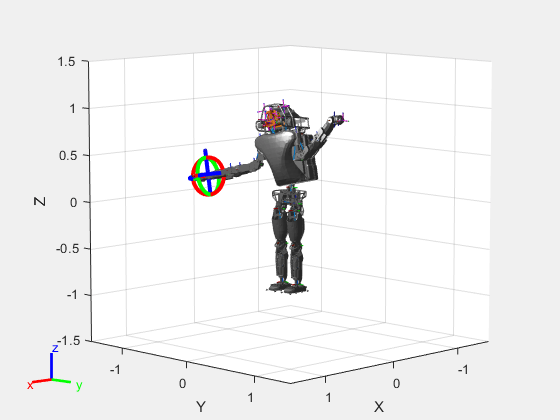
将右手移到新位置。以编程方式设置配置。标记移动到末端执行器的新位置。
currConfig(1:18) = [-0.1350 -0.1498 -0.0167 -0.3415 0.4996 0.0747 0.0377 0.0718 -0.8117 -0.0427 0 0.4349 -0.5738 0.0563 -0.0095 0.0518 0.8762 -0.0895]';viztree。配置= currConfig;
保存当前配置。
addConfiguration (viztree)
添加约束
默认情况下,机器人模型只尊重关节的极限rigidBodyJoint对象。RigidBodyTree财产。要添加约束,请生成机器人约束对象,并将它们指定为单元格数组约束财产。要查看机器人约束的列表,请参见逆运动学。为骨盆指定一个姿态目标,使其固定在原位。为右脚指定一个位置目标,将其提升到其当前位置的前面和前面。
fixedWaist = constraintPoseTarget(“骨盆”);raiseRightLeg = constraintPositionTarget(“r_foot”,“TargetPosition”,[10 0 0.5]);
将这些约束应用到交互式刚体树对象作为单元格数组。结果图中的右腿会改变位置。
viztree。约束={固定腰抬高右腿};
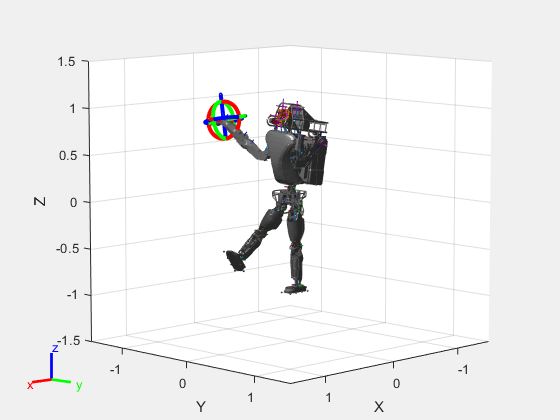
注意右腿位置的变化。也保存这个配置。
addConfiguration (viztree)
回放配置
要回放配置,迭代存储的配置索引,并在每次迭代中将当前配置设置为存储的配置列向量。因为构型存储为列向量,所以使用矩阵的第二维。
为i = 1:size(viztree. storedconfigurations,2) viztree. storedconfigurations。Configuration = viztree.StoredConfigurations(:,i);暂停(0.5)结束
输入参数
版本历史
R2020a中引入
您也可以从以下列表中选择一个网站: