机器人编程涉及编写计算机程序,使一个机器人感知环境,制定计划和决定,并执行任务。例如,编程的接地机器人自主导航内部的建设需要感测和感知,定位和映射,以下路径规划和路径,执行器控制装置,以及其它任务。
机器人编程一般包括:
- 使机器人通过使用计算机视觉和深学习对象检测,分类和跟踪,以及运动估计算法来感知环境
- 通过算法使机器人自主同时定位和地图创建(SLAM),防撞和运动规划
- 通过控制设计控制系统,机器人的行为,如模型预测控制,计算扭矩控制和路径跟踪
- 连通并具有不同的嵌入式平台,如CPU,图形处理器,FPGA和微控制器连接的传感器和致动器接口连接
当机器人编程开始,工程师经常开发机器人的预期行为的状态机图。此外,编程语言如C / C ++,Python的®,爪哇®和MATLAB®是用于算法开发,和中间件如机器人操作系统(ROS)用于硬件抽象,低级别的设备控制,消息传递之间的过程,以及硬件部署。
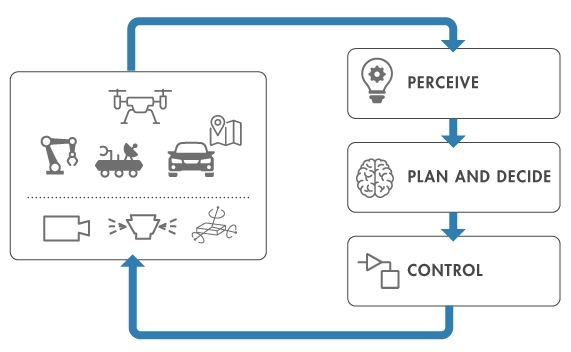
一个常见的机器人编程工作流程。
在一个步骤中的错误往往会影响整个机器人编程工作流程。建模和模拟软件的帮助,而不是原型时正在生产的机器人,或者更糟的是,在使用的现实环境中消除识别问题的实施错误。模拟系统还帮助工程师完善了调整控制参数,系统设计,无需担心平台依赖性或具有对机器人的硬件。
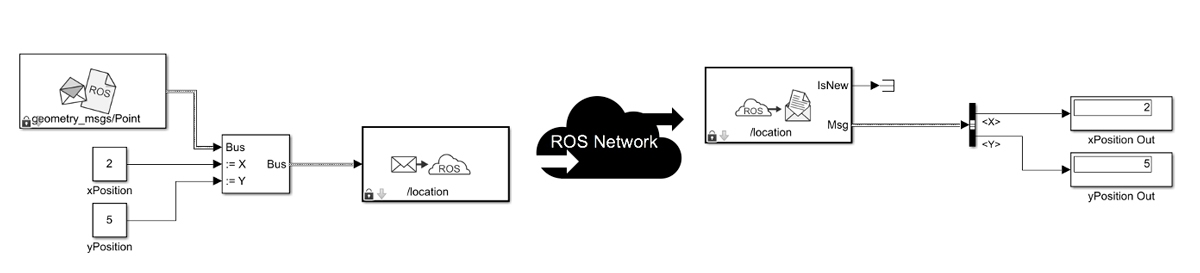
MATLAB提供了一些内置的算法和功能为机器人编程。例如,只需几行外的开箱深学习MATLAB算法,机器人可以识别环境中的物体。金宝appSimulink的®提供了一种使用建模和模拟与基于模型的设计为机器人编程预构建块。所述ROS块在Simulink,例如金宝app,使机器人程序员通过ROS网络订阅传感器数据和发布的机器人命令,而无需编写代码。
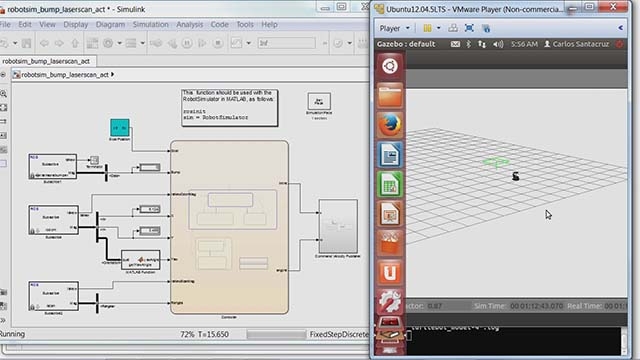
使用MATLAB和Simulink金宝app对机器人编程,你可以建立一个可伸缩的机器人仿真到试制,试验概念模型和调试成本低廉。然后你就可以同时保持的算法,其余的在相同的仿真环境中使用的高保真模型进行验证。一旦所期望的结果是在机器人仿真得到的,可以生成用于从共同的编程语言的仿真模型的嵌入式系统独立的可执行代码。金宝app使用来自MATLAB和Simulink的ROS连接到ROS网络中,可以生成C ++ R金宝appOS直接从MATLAB和Simulink节点验证上启用ROS机器人和机器人仿真器,如凉亭应用。
{kind=link}