计算机视觉的工具箱
コンピュータービジョン,3次元ビジョン,および映像処理システムの設計およびテスト

计算机视觉工具箱™は,コンピュータービジョン,3次元ビジョン,および映像処理システムの設計とテストのためのアルゴリズム,関数,およびアプリを提供します。特徴の検出,抽出,マッチングに加えて,オブジェクトの検出と追跡を行うことができます。3次元ビジョンでは、単一、ステレオ、および魚眼レンズカメラのキャリブレーション、ステレオ ビジョン、3 次元構造の再構築、LiDAR 点群と 3 次元点群の処理がサポートされています。コンピューター ビジョンアプリはグラウンドトゥルース ラベリングとカメラ キャリブレーションのワークフローを自動化します。
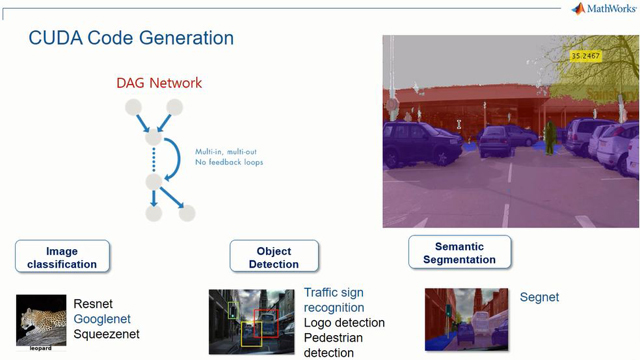
YOLO v2,意思R-CNN更快,およびACFなどのディープラーニングおよび機械学習アルゴリズムを使用して,カスタムのオブジェクト検出器の学習を実行できます。セマンティックセグメンテーションでは,SegNet, U-Net,およびDeepLabなどのディープラーニングアルゴリズムを使用できます。学習済みモデルを使用すると,顔や歩行者,その他のオブジェクトを検出できます。
アルゴリズムはマルチコアプロセッサおよびGPU上で実行することで高速化できます。ツールボックスのほとんどのアルゴリズムでは,既存のコードとの統合,デスクトッププロトタイピング,および組み込み画像システム展開を統合するためのC / c++コード生成をサポートしています。
详细を见る:

オブジェクトの検出と认识
yolo v2,更快的r-cnn,acf,Viola-jonesなどなどオブジェクトのの习,评価,展开を行うワーク。学校済み済みにより,颜や歩行,その他のオブジェクトが検出さます。


快R-CNNを使用したオブジェクト検出。
セマンティックセグメンテーション
SEGNET,FCN,U-NET,DEEPLAB v3 +などのネットワークをして个々ピクセルとボクセルをするでとボクセルをするで,画像と3次元ボリュームセグメント。

グラウンドトゥルースのラベル付け
ビデオビデオラベラーアプリイメージアプリアプリをしオブジェクト検出,セマンティックセグメンテーション,シーン分享の付け自动化します。

ビデオビデオラベラーアプリをを使使たグラウンドトゥトゥのラベルラベルラベル
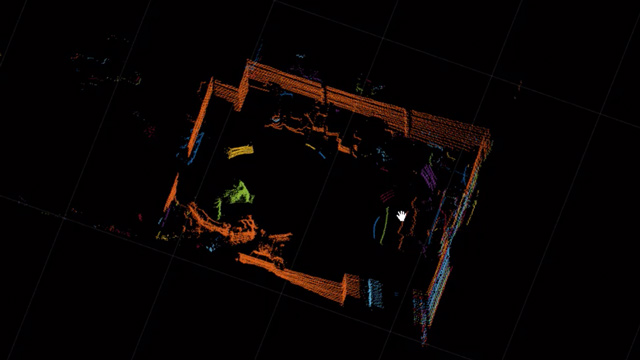
点群のレジストレーション
正規分布変換(无损检测),反復最近接点(ICP),コヒーレント点ドリフト(CPD)アルゴリズムを使用して3次元点群のレジストレーションを行います。

点群のレジストレーションと繋ぎ合わせ。
セグメンテーションおよび形状の近似
点群をクラスターにセグメント化し,幾何学的形状を点群に近似させます。自動運転アプリケーションとロボット工学アプリケーション用に激光雷达データ内の基平面をセグメント化します。

セグメント化された激光雷达点群。
単一カメラのキャリブレーション
カメラキャリブレーターアプリを使用して,チェッカーボードの検出を自動化し,ピンホールカメラと魚眼レンズカメラのキャリブレーションを行います。
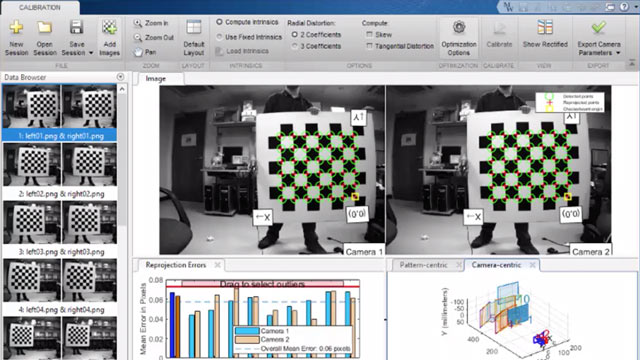
ステレオカメラキャリブレーション
深度の計算と3次元シーンの再構成を行うために,ステレオペアをキャリブレーションします。

ステレオカメラキャリブレーターアプリ。

マルチビューのモーションの構造。
ステレオビジョン
ステレオカメラのペアを使て,深度を推定し,3次元シーンを再构筑し。

相対深度を表すステレオ視差マップ。
特徴点検出,特徴量抽出およびマッチング
团,複数の画像からエッジ,およびコーナーなどの関心のある特徴を検出,抽出,およびマッチングします。

特徴点の検出,抽出,およびマッチングによる要素の多いシーンでのオブジェクト検出。
特徴に基づく画像レジストレーション
複数の画像において特徴をマッチングし,画像間の幾何学的変換を推定し,イメージシーケンスのレジスタリングを行います。

时尚に基于レジストレーションさたたパノラマ。
オブジェクト追迹
ビデオシーケンス内でオブジェクトの軌跡をフレームからフレームへ追跡します。

追跡したオブジェクトの軌跡を示す追跡痕。
动画推定
オプティカルフロー,ブロックマッチング,およびテンプレートマッチングを使用して,ビデオフレーム間の動きを推定します。

固定カメラを使用した移動するオブジェクトの検出。

コード生成
ツールボックスの関数,クラス,システムオブジェクト,およびブロック用のC / c++, CUDAコード,および墨西哥人関数を生成します。
视频标签および图片标志
ピクセルラベルのコピーおよび貼り付け,改善したパンとズーム,フレーム移動,ラインROI,および图片标志にサブラベルを追加
オブジェクト検出器でのデータ強化
画像と境界ボックスを変換
セマンティックセグメンテーション
DeepLab v3 +と3 d U-Netネットワークを使用して画像と3 dボリュームの個別のピクセルを分類
ディープラーニングでのオブジェクト検出
より高速なR-CNNエンドツーエンド学習,アンカーボックスの推定,マルチチャネル画像データの使用
ディープラーニングの加速
Mex高层化学を使yolo v2とセマンティックセグメンテーション最适
これらの机械および対応する关键有关部の详细详细は,リリースノートを参照してください。
