Matlabおよびsimulink金宝app
知覚から驾驶への自律型アプリケーションを开発,システムシステムのの挙を化
ロボティクスロボティクス研研エンジニアエンジニアエンジニア,matlab®およびs金宝appimulink.®ををからして,知覚から运动词设计,シミュレーション,検证を行ててます。
- センサーノイズやモーターモーター振,细部细部に至るまでロボットロボットシステムモデルモデル
- 正源な动作,ダイナミクス,接触特性をシミュレーション。
- 高于のの性低の制御ののを设计してて最适最适と设计设计して.
- メンテナンスされたアルゴリズムのライブラリ使使をししたデータデータのデータのの。
- シミュレーションからハードウェアインザループ(hil)テストまで,ロボットの设计やアルゴリズムを的に検证。
- ROS経由経由でロボット,またはまたは直接,FPGA,PLC,GPUにアルゴリズムを展开。
「モデルベースデザインと自动コード生成により,敏捷justinの复雑な53の自由度に対处するますます。モデルベースデザインがば,困难なリアルタイムをを実复雑なロボットなどののコントローラーのの「不可能た。」
德国航空航天中心(DLR)Bertholdbäuml



センサーデータの制剂
MATLABおよびSI金宝appMULINKのの力量なツールボックス使使て,センサーデータ致理性アルゴリズムをを装。
- ROS,シリアルシリアルのプロトコルを経由ててセンサー接続。
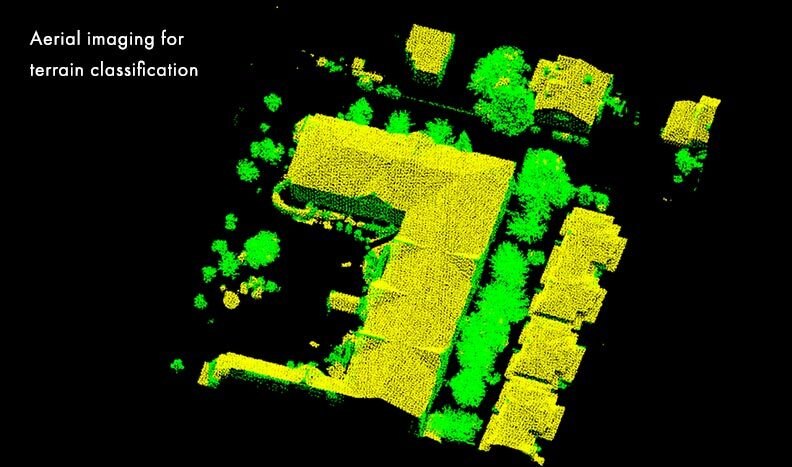
- カメラ,ソナー,延立雷达,GPS,IMUからののを可催化。

チュートリアル
- 自律法,パート4:a *およびrrtををたプランニング(17:54)
- ロボットマニピュレーターの轨道计画(18:21)
- 赤外线センサーを使使使ナビゲーションロボットナビゲーション(9:35)

プラットフォームプラットフォームおよびターゲットとと通信
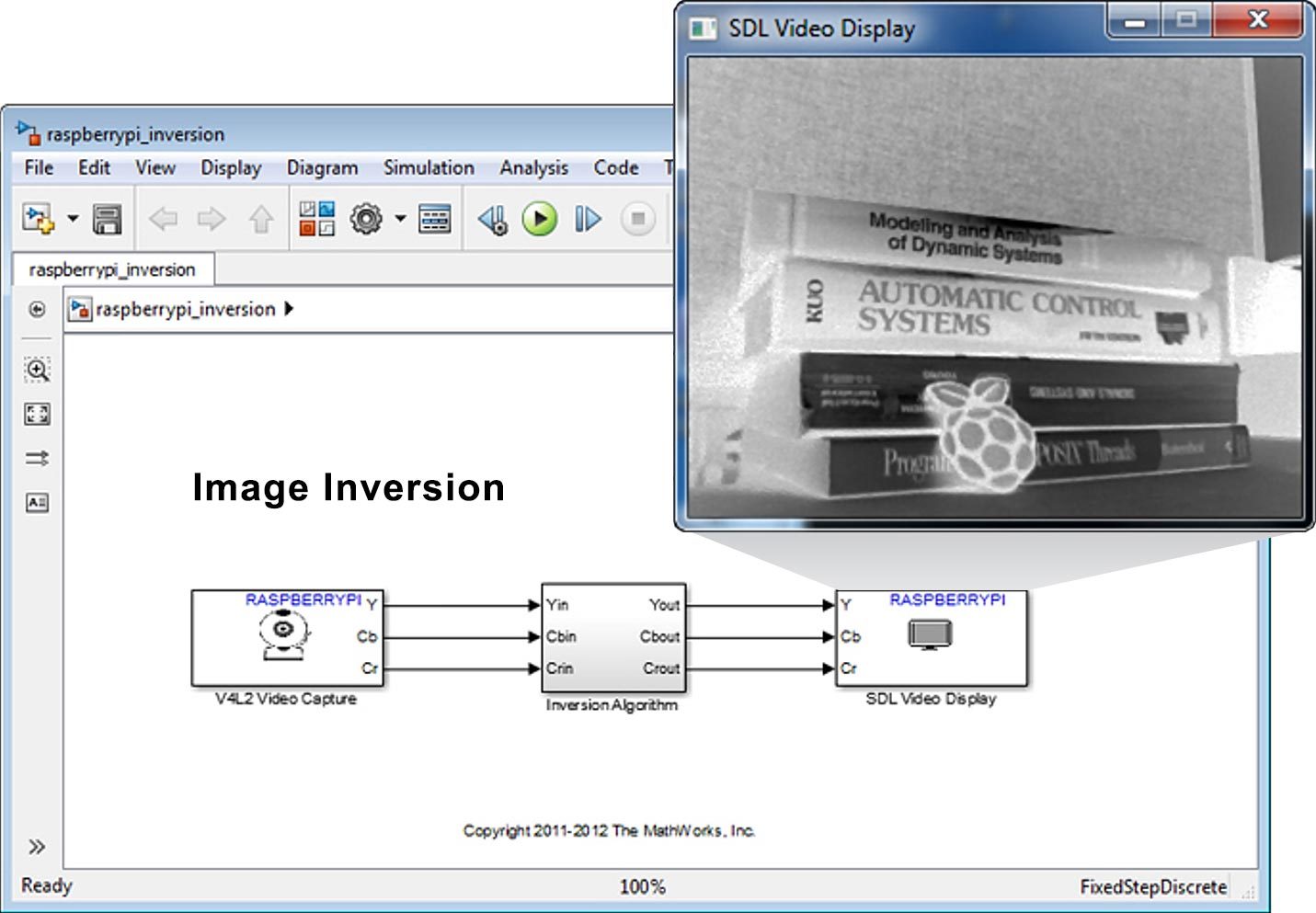
arduino.®,覆盆子PI™などのrosベースのシステムマイクロコントローラーに自律アルゴリズムを开し.can,ethercat®,802.11™,TCP / IP,UDP,I2C,SPI,Modbus®,蓝牙®などのプロトコルを介し,组み込みターゲットと通信しし。
チュートリアル
ハードウェアインターフェイスのサポート
「matlabおよびsi金宝appmulinkを使ばば,制御制御の开発,デバッグ,データ解析などのためにのを切り替える,単このの切り替える使,単このの环境により。播种状态を短缩し,エラーエラーの入り込む地をできるのです。」
John Wen博士,Rensselaer理工学院
关键词する応応

无料评価版を入手する
30日の无料评価版本はこちら

ご质问はこちらへ
ロボット工学のの家にご相谈ください。