模拟虚幻引擎环境中的视觉和雷达传感器
此示例显示如何使用EpicGames®的UnrealEngine®仿真环境实现Simulink®的跟踪和传感器融合的合成数据仿真。金宝app它紧密跟随使用SIMULINK中的合成雷达和视觉数据的传感器融合金宝app例子。
介绍
自动化驾驶工具箱提供了用于创作,模拟和可视化虚拟驾驶场景的工具。通过这些方案,您可以模拟罕见和潜在的危险事件,从场景产生合成雷达和视觉检测,并使用合成检测来测试车辆算法。此示例使用3D仿真环境介绍Simulink中的整个合成数据工作流程。金宝app
模型设置和概述
在运行此示例之前,使用此过程创建方案中的道路,演员和轨迹:
从一部分道路中提取中心位置以编程方式定义道路布局3D场景,使用介绍的技术选择虚幻引擎模拟的航点。
创造一条道路驾驶场景设计师这使这些提取的位置作为其道路中心值。
在道路上定义多个移动车辆,这些车辆具有与中定义的场景中类似的轨迹的轨迹使用SIMULINK中的合成雷达和视觉数据的传感器融合金宝app。
保存方案文件Curved_Road.mat,从驱动方案设计器使用方案阅读器块将它们加载到模型中。
从方案阅读器块的输出车辆姿势并将其转换为世界坐标。使用立方体到3D仿真块转换为3D车辆块所需的X,Y和偏航。
由方案读取器块提供的演员姿势由模拟3D带地面的车辆块在每次模拟的每个时间步骤定义自我车辆,铅车辆和其他车辆的位置。
关闭;如果〜ispc错误(['3D模拟仅在Microsoft'支金宝app持,char(174),'Windows',char(174),'。']);结尾Open_System('Simulatessorsin3DenvironmentModel');
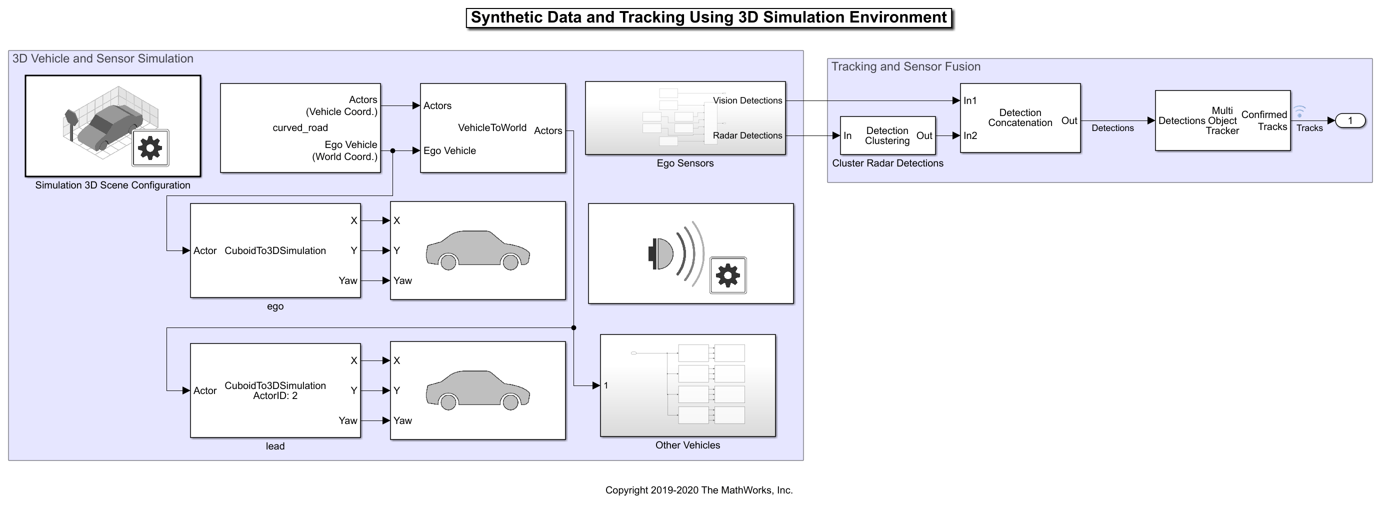
模拟传感器检测
在此示例中,您模拟了一个自助式车辆,即覆盖完整360度视场的六个雷达传感器上的视觉传感器。自助式车辆在车辆的前部和后部配备了远程雷达。车辆的每一侧有两个短距离雷达,每个覆盖90度。每个侧面覆盖从车辆的中间到后面的一个雷达。每个侧面覆盖的另一个雷达从车辆的中间向前覆盖。
自我传感器子系统包含一个仿真3D视觉检测发生器街区和六个模拟3D概率雷达块模型先前描述的传感器。雷达块的输出使用a连接检测替补堵塞。在顶级模型中,随着视觉输出,雷达输出将用视觉输出组成,以创建单个检测流被融合多对象跟踪器堵塞。
Open_System('SimulatessorsIn3denvironmentModel / Ego传感器')

概率雷达“请参阅”不仅是演员的物理尺寸(例如,长度,宽度和高度),而且对演员也敏感电气尺寸。演员的电尺寸被称为雷达横截面(RCS)。模拟中车辆的RCS模式是使用的仿真3D概率雷达配置堵塞。

使用此块定义模拟中所有Actor的RCS模式。任何没有指定的RCS模式的演员都使用默认的RCS值。
跟踪和传感器融合
在使用辅助检测聚类块之前,自我车辆的雷达套件产生的检测是使用辅助检测聚类块进行预处理多对象跟踪器堵塞。多目标跟踪器配置有相应的Simulink示例中使用的相同参数,金宝app使用SIMULINK中的合成雷达和视觉数据的传感器融合金宝app。来自多目标跟踪器块的输出是确认轨道的列表。
展示
这鸟瞰是Simulink中的模型级可视化工具从Simulink ToolStrip打金宝app开。打开范围后,单击找到信号设置信号。然后运行模拟以显示自我演员,雷达和视觉检测和轨道。以下图像显示此示例的范围的显示。

当模拟开始时,需要几秒钟来初始化虚幻发动机仿真环境,特别是在第一次运行时。完成此初始化后,仿真环境将在单独的窗口中打开。以下图像是与上一张图像中所示的鸟瞰影视范围的快照对应的模拟窗口的快照。

模拟车辆显示在仿真窗口中。模拟产生的检测和曲目仅在鸟瞰范围内显示。
概括
在此示例中,您了解到如何从3D场景中提取道路中心,以便在驾驶场景设计器应用程序中使用。您还了解了如何导出从道路段创建的车辆轨迹,以便在Simulink中使用3D仿真环境。金宝app然后,您学习了如何在虚幻发动机环境中配置概率的相机模型和多个概率雷达模型,以及如何使用多目标跟踪器将检测器熔断在自助式车辆的周围周围的多个传感器中。然后,由跟踪器产生的确认轨道可以用于控制算法,例如自适应巡航控制(ACC)或前进碰撞警告(FCW)。
close_system('Simulatessorsin3DenvironmentModel');
也可以看看
应用
块
相关话题
您还可以从以下列表中选择一个网站:
