LagOp
创建滞后算子多项式
描述
创建一个p度,米-维滞后算子多项式一个(l) =一个0+一个1l1+一个2l2+……+一个plp通过指定系数矩阵一个0、……一个p以及相应的滞后。l是滞后(或退档)操作符使ljyt=yt- - - - - -j.
LagOp对象的功能使您能够处理指定的多项式。例如,您可以通过一个多项式过滤时间序列数据,确定一个是否稳定,或者通过执行多项式代数(包括加、减、乘和除)来组合多个多项式。
为了将一个包含滞后算子多项式的动态模型拟合到数据上,需要创建合适的模型对象,然后将其拟合到数据上。关于单变量模型,请参见华宇电脑和估计;有关多变量模型,请参见varm和估计.为了进一步分析,您可以创建LagOp对象的估计系数。
创建
描述
输入参数
属性
对象的功能
例子
创建和修改单变量滞后算子多项式
创建一个LagOp对象,该对象表示滞后算子多项式
A=LagOp([1-0.60.08])
一个=一维滞后算子多项式 : ----------------------------- 系数:-0.6 - 0.08[1]滞后:[0 1 2)学位:2维:1
显示滞后系数0。
a0 = A.Coefficients {0}
a0 = 1
给第三个滞后赋一个非零系数:
A.系数{3}=0.5
一个=一维滞后算子多项式 : ----------------------------- 系数:[1 -0.6 0.08 0.5]滞后:[0 1 2 3]学位:3维:1
多项式次数增加到3..
指定多项式滞后
创建一个LagOp对象,该对象表示滞后算子多项式
nonzeroCoeffs = [1 0.25 0.1 0.05];时滞= [0 4 8 12];= LagOp (nonzeroCoeffs“滞后”,滞后)
A=1-D滞后算子多项式:------------------------------系数:[1 0.25 0.1 0.05]滞后:[0 4 8 12]度:12维:1
从滞后算子多项式中提取系数,并显示从滞后0到滞后12的所有系数。
allCoeffs = toCellArray(一个);%提取系数allCoeffs = cell2mat (allCoeffs ');allLags = 0: A.Degree;%准备显示延迟表(allCoeffs,“RowNames”,“滞后”+字符串(allLags))
ans=13×1表allCoeffs _________滞后0 1滞后10滞后2 0滞后3 0滞后4 0.25滞后5 0滞后6 0滞后7 0滞后8 0.1滞后9 0滞后10 0滞后11 0滞后12 0.05
创建多元滞后算子多项式
创建一个LagOp对象,该对象表示滞后算子多项式
Phi0 = [0.5 0 0;...0 1 0;...0 0 -0.5];Phi4 = [1 0.25 0.1;...-0.5 1 -0.5;...0.15 - -0.2 1);= {Phi0 Phi4};时滞= [0 4];一个= LagOp(φ,“滞后”,滞后)
A=3-D滞后算子多项式:------------------------------系数:[具有2个非零系数的滞后索引单元数组]滞后:[0 4]度:4维:3
使用滞后算子多项式
创建多元滞后算子多项式
创建2-D 3次滞后算子多项式
m = 2;A0 =眼(m);A1 = [0.5 0.25;-0.1 - 0.4);A3 = 0.1 * A1;Coeffs = {A0 A1 A3};时滞= [0 1 3];一个= LagOp(多项式系数,“滞后”,滞后)
A =二维滞后算子多项式:-----------------------------系数:[带有3个非零系数的滞后索引单元阵列]滞后:[0 1 3]度:3维:2
确定多项式稳定性
一个时滞算子多项式是稳定的,如果它的特征多项式的所有特征值的大小小于1。
确定多项式是否稳定,并返回其特征多项式的特征值。
(tf,测评)=趋于稳定(A)
tf =逻辑1
测评=6×1复杂-0.5820 - 0.1330i 0.0821 + 0.2824i 0.0821 - 0.2824i 0.0499 + 0.2655i
逆多项式
计算的倒数 通过将2×2的单位矩阵除以 .
Ainv = mrdivide(眼睛(A.Dimension))
Ainv = 2- d滞后算子多项式:-----------------------------系数:[带有10个非零系数的滞后索引单元阵列
Ainv是一个LagOp表示函数的倒数的对象
,一个9次滞后算子多项式。理论上,滞后算子多项式的逆是无限次的,但是mrdivide系数幅值公差截断多项式。
乘 和它的逆矩阵。
checkinv=Ainv*A
checkinv=2-D滞后算子多项式:-------------------------------系数:[具有4个非零系数的滞后索引单元数组]滞后:[0 10 11 12]度:12维:2
因为逆计算返回截断的理论逆,即乘积checkinv包含代表剩余部分的滞后。你可以减少mrdivide系数大小公差,以获得一个更精确的反多项式。
过滤时间序列
生成二维时间序列 通过过滤二维序列的100随机标准高斯偏差 通过多项式。
T = 100;e = randn (T, m);y =过滤器(A, e);情节(A。度+ 1):T,y) title(“过滤系列”)
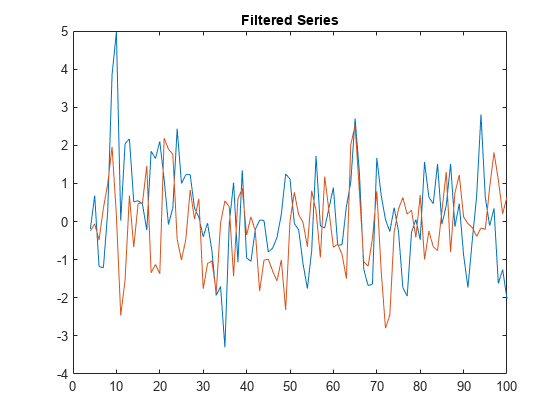
y一个97乘2的矩阵代表什么
y有p观察结果少于e因为滤器需要第一个p的观察e生成时初始化动态序列的步骤: y (1:4).
你也可以从以下列表中选择一个网站: