PEM
预测误差估计的线性和非线性模型
描述
例子
改进估计状态空间模型
估计使用子空间方法的离散时间状态空间模型。然后,通过最小化预测误差完善它。
使用估计离散时间状态空间模型n4sid,它适用的子空间方法。
加载iddata7Z7;z7a = Z7(1:300);选择= n4sidOptions(“焦点”,“模拟”);init_sys = n4sid (z7a 4选择);
init_sys提供了一个73.85%的拟合到估计数据。
init_sys.Report.Fit.FitPercent
ans = 73.8490
使用PEM以提高拟合接近程度。
sys = pem (z7a init_sys);
分析结果。
比较(z7a,SYS init_sys);
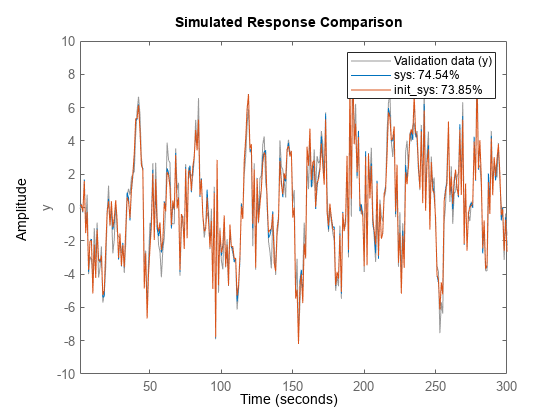
SYS提供了74.54%配合到估计数据。
估计非线性灰盒模型
估计非线性灰盒模型的参数以拟合直流电机数据。
加载的实验数据,并指定信号属性,例如开始时间和单位。
负载(fullfile (matlabroot“工具箱”,'IDENT','iddemos',“数据”,'dcmotordata'));数据= IDDATA(Y,U,0.1);data.Tstart = 0;data.TimeUnit ='S';
配置非线性灰盒模型(idnlgrey)模型。
对于本例,使用dcmotor_m.m文件。要查看此文件,请键入编辑dcmotor_m.m在MATLAB®命令提示。
FILE_NAME ='dcmotor_m';order = [2 1 2];参数= (1;0.28);initial_states = (0, 0);t = 0;init_sys = idnlgrey (file_name、秩序、参数initial_states Ts);init_sys。TimeUnit ='S';setinit(init_sys,'固定'{FALSE FALSE});
init_sys与它的结构非线性灰盒模型通过描述dcmotor_m.m。该模型具有一个输入,两个输出和两个状态,如通过指定订购。
setinit (init_sys“固定”,{假假})的初始状态init_sys都是免费的估计参数。
估计模型参数和初始状态。
SYS = PEM(数据,init_sys);
SYS是一个idnlgrey模型,它封装了参数估计和协方差。
分析估计结果。
比较(数据,SYS,init_sys);
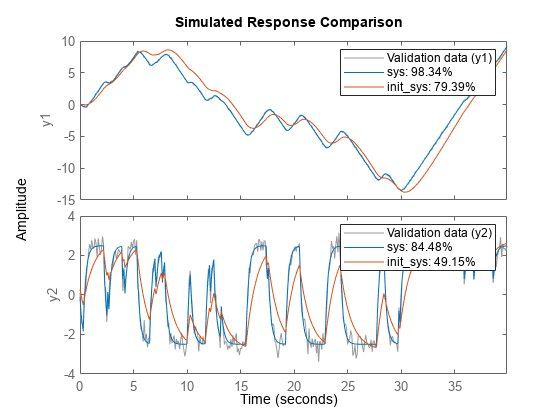
SYS提供了98.34%的拟合估计数据。
配置估计使用过程模型
创建过程模型结构,并更新其参数值以最小化预测误差。
初始化过程模型的系数。
init_sys = idproc (“P2UDZ”);init_sys.Kp = 10;init_sys.Tw = 0.4;init_sys.Zeta = 0.5;init_sys.Td = 0.1;init_sys.Tz = 0.01;
该Kp,TW,泽塔,TD,TZ系数init_sys用他们最初的猜测来配置。
使用init_sys配置使用测得的数据的预测误差最小化模型的估计。因为init_sys是一个idproc模型,使用procestOptions创建选项集。
加载iddata1Z1;选择= procestOptions (“显示”,'上','SearchMethod',“lm”);SYS = PEM(Z1,init_sys,优化);
检查模型是否适合。
sys.Report.Fit.FitPercent
ans = 70.6330
SYS提供了70.63%的适合测量数据。
输入参数
输出参数
算法
PEM采用数值优化,以尽量减少成本函数,为预测误差的加权范数,对标量输出定义为:
哪里e (t)是所测量的输出和该模型的预测输出之间的差。对于线性模型,误差被定义为:
哪里e (t)是向量和代价函数吗 为标量值。下标ñ表示代价函数是数据样本个数的函数,值越大越准确ñ。对于多输出模型,前一个方程比较复杂。更多信息,见第7章系统辨识:理论对于用户,第二版,由伦纳特·晶,普伦蒂斯霍尔PTR,1999年。
选择功能
您也可以达到同样的结果PEM通过对各种模型结构使用专用的估计命令。例如,使用init_sys ss(数据)估计状态空间模型。
之前介绍过的R2006a
您也可以从以下列表中选择一个网站: