非线性MPC设计
设计模型预测控制器,具有非线性预测模型,成本和约束
与传统的线性MPC一样,非线性MPC使用基于模型的预测和约束优化的组合来计算每个控制间隔的控制动作。关键差异是:
预测模型可以是非线性的并且包括时变参数
平等和不等式约束可以是非线性的
要最小化的标量成本函数可以是决策变量的非分量(线性或非线性)函数。
默认情况下,非线性MPC控制器使用的是使用的非线性编程问题粉刺功能,需要优化工具箱™软件。如果您没有优化工具箱软件,则可以指定您自己的自定义非线性求解器。
有关更多信息,请参阅非线性MPC。
职能
nlmpc. |
非线性模型预测控制器 |
nlmpcmove. |
计算非线性MPC控制器的最佳控制动作 |
nlmpcmoveopt. |
选项设置为nlmpcmove函数 |
验证FCNS. |
检查NLMPC对象进行潜在问题的预测模型和自定义功能 |
ConvertTompc. |
将NLMPC对象转换为一个或多个MPC对象 |
CreyeparameterBus. |
创建Simul金宝appink总线对象并配置用于将模型参数传递给非线性MPC控制器块的总线创建块 |
块
| 非线性MPC控制器 | 模拟非线性模型预测控制器 |
话题
非线性MPC基础知识
非线性模型预测控制器使用非线性预测模型,成本函数或约束控制工厂。
为了定义非线性MPC控制器的预测模型,指定状态和输出功能。
非线性MPC控制器支持通用成本函数,例如系统状态,输金宝app入和输出的线性或非线性功能的组合。
除标准线性MPC约束外,您还可以为非线性MPC控制器指定自定义线性和非线性约束。
默认情况下,非线性MPC控制器使用的是使用它们的控制移动粉刺Optimization Toolbox的功能。您还可以指定您自己的自定义非线性求解器。
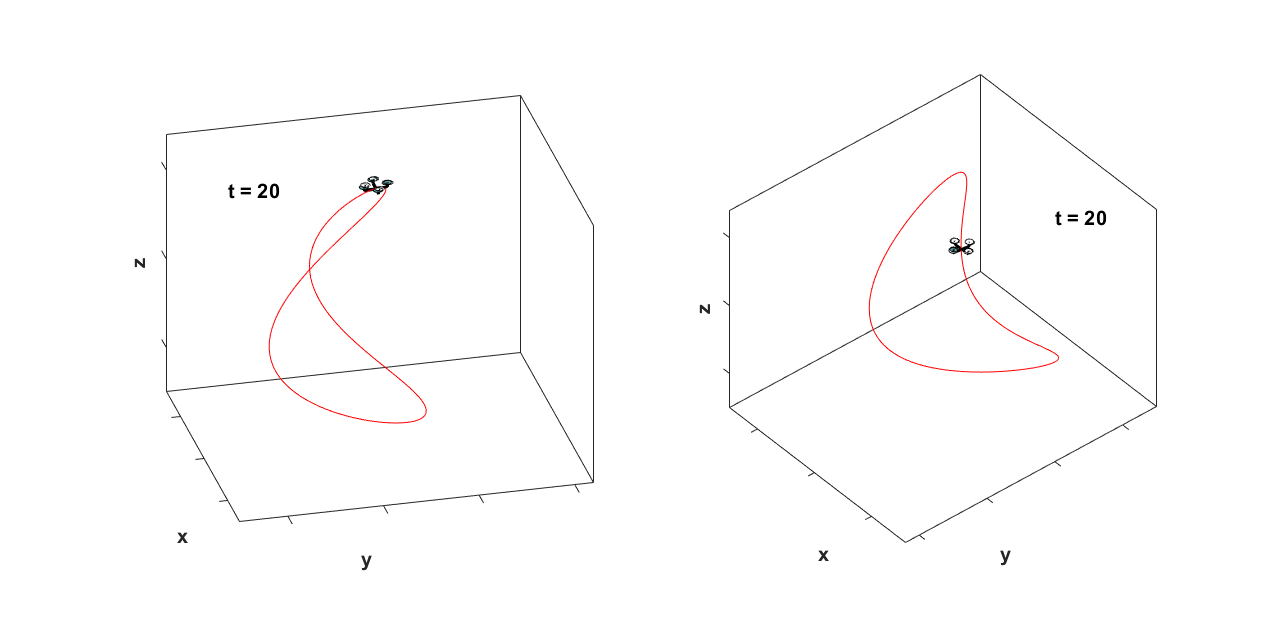
您可以使用非线性MPC进行最佳轨迹规划和闭环控制应用。
反馈控制
在操作点之间的转换时控制非线性工厂。
使用非线性模型预测控制器实现推车上倒立摆的摆动和平衡控制。
您可以从非线性MPC控制器生成一个或多个线性MPC控制器,并使用这些控制器进行增益预定的控制应用。
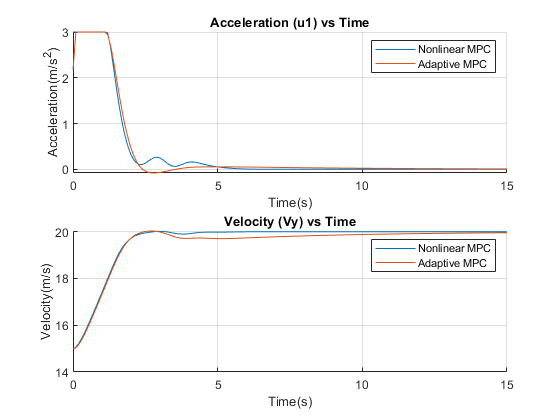
模拟非线性MPC控制器作为自适应和时变MPC控制器,并比较性能。
相关信息
特色例子

您还可以从以下列表中选择一个网站:
