模型预测控制工具箱
モデル予测コントローラーの设计およびシミュレーション
模型预测控制工具箱™は,线形および非线形のモデル予测制御(MPC)を使用してコントローラーの设计およびシミュレーションを行うための关数,アプリ,Simulink的金宝app®ブロックを提供します。このツールボックスを使用することで,プラントモデルや外乱モデル,ホライズン,制约,重みを指定できます。闭ループシミュレーションを実行することにより,コントローラーの性能を评価できます。
実行时に重みと制约を変化させることにより,コントローラーの挙动を调整できます。このツールボックスには,展开可能な最适化のソルバーが付属しています。また,カスタムのソルバーを使用することもできます。非线形プラントを制御するには,适応型MPC,ゲインスケジュール型MPC,および非线形MPCコントローラーを実装できます。サンプルレートが高速なアプリケーションについては,通常のコントローラーから阳的なモデル予测コントローラーを生成するか,近似解を実装できます。
ラピッドプロトタイピングや组み込みシステム実装(最适化ソルバーの展开など)については,このツールボックスを使用して,CコードやIEC 61131-3ストラクチャードテキストを生成することができます。
详细を见る:

MPCデザイナーアプリ
MPCコントローラーを対话的に设计するには,内部プラントモデルの定义と,ホライズン,重み,制约の调整を行います。シミュレーションシナリオを使用して,コントローラーの性能を検证します。复数のMPCコントローラーの応答を比较します。
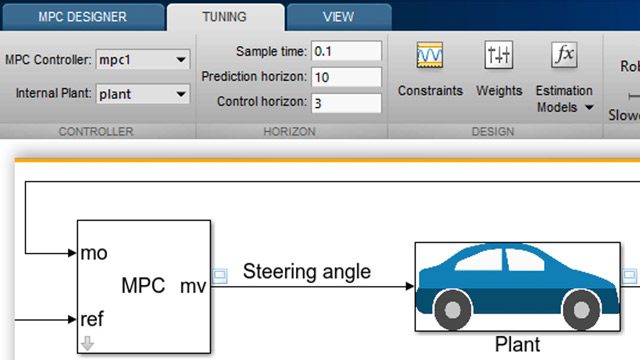
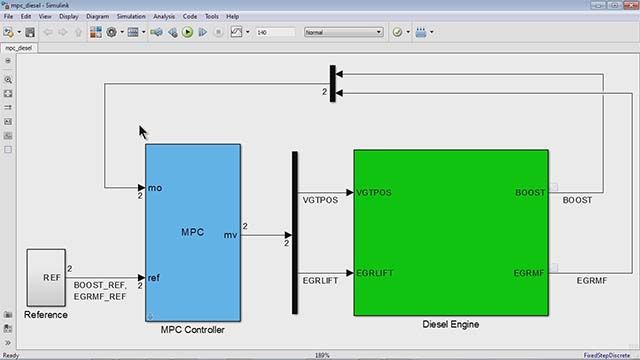
金宝appSimulink中でのMPCの设计
ツールボックスで提供されるMPC控制器ブロックやその他のブロックを使用して,Simulink中で金宝appMPCコントローラーをモデル化し,シミュレーションします。金宝appSimulink的控制设计™を使用してS金宝appimulink的モデルを平衡化および线形化することで,MPCコントローラー向けに内部线形时不変プラントモデルを计算し,プラント入力と出力のノミナル値を取得します。
MATLABでのMPC设计
コマンドライン关数を使用してMPCコントローラーを设计します。内部プラントモデルを定义し,重み,制约,および他のコントローラーパラメーターを调整します。闭ループシステムの応答をシミュレーションして,コントローラーの性能を评価します。

コマンドラインでMPCコントローラーを设计します。
事前に用意されているブロック
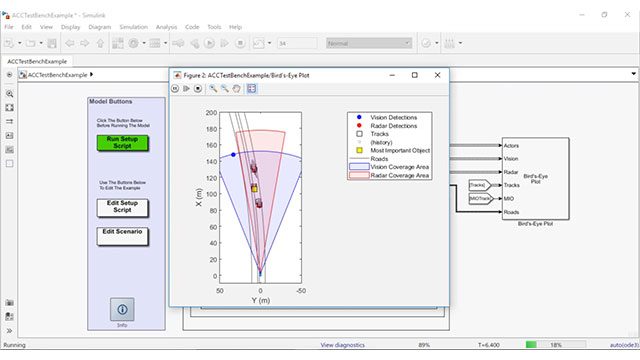
车间距离制御システムや车线逸脱防止支援システム,パス追従制御システムのブロックをADASアプリケーションの出発点として使用し,必要に応じてカスタマイズします。车载展开用のコードを事前に用意されているブロックから生成します。
事前に用意されているS金宝appimulink的ブロックを使用して,车间距离制御システムを设计。
リファレンスアプリケーションの例
リファレンスアプリケーションの例を使用して,自动运転システムに必要なMPCコントローラーの设计と展开のワークフローを実施します。また,リファレンスアプリケーションの例では,システムのさまざまな部分を多様な忠実度でモデル化する方法を确认することもできます。
线形MPC
线形MPCコントローラーを设计するには,控制系统工具箱™の线形时不変(LTI)システムとして内部プラントモデルを指定するか,Simulink的控制设计でSimuli金宝appnk的モデルを线形化します。また,系统辨识工具箱™を使用して,测定された入出力データから作成されたモデルをインポートすることもできます。
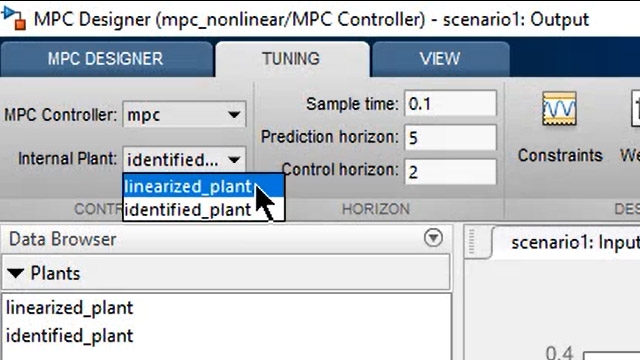
线形MPC设计の内部プラントモデルの指定。
适応型MPC
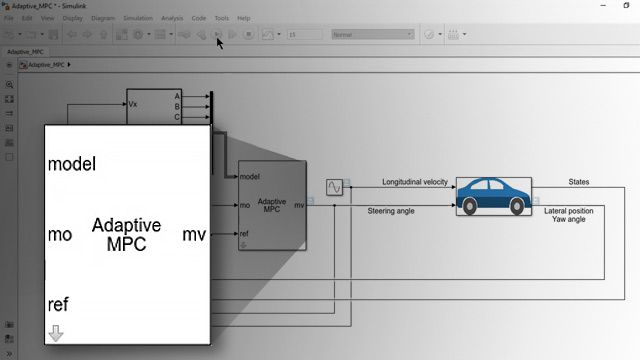
コマンドライン关数と自适应MPC控制器ブロックを使用して,适応型MPCコントローラーの设计およびシミュレーションを行います。実行时にプラントモデルを更新し,コントローラーの入力に指定します。渐近安定性が保证された组み込みの线形时変(LTV)カルマンフィルターを使用して,适応型モデル予测コントローラーで状态推定を行います。
ゲインスケジュール型MPC
多MPC控制器ブロックによって,幅広い操作条件で非线形プラントを制御します。実行时にそれぞれの操作点とコントローラー间のスイッチに合わせて,MPCコントローラーを设计します。
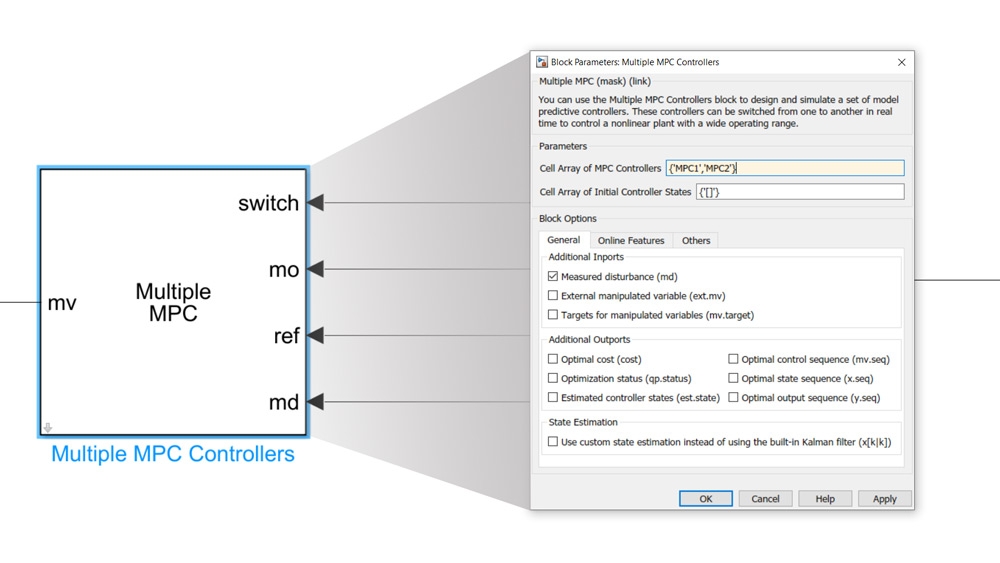
多MPC控制器ブロックを使用して,ゲインスケジュール型MPCコントローラーを设计します。
コントローラーのパラメーター
内部プラントモデルを定义したあと,サンプル时间,予测制御ホライズン,スケール系数,入力制约と出力制约,および重みを指定して,MPCコントローラーを设计します。また,このツールボックスでは,制约缓和や时変制约と重みもサポートされています。

MPCデザイナーアプリにおけるコントローラーのパラメーターの指定。
状态推定
组み込みの状态推定器を使用して,测定された出力からコントローラーの状态を推定します。また,カスタムのアルゴリズムで状态推定を行うこともできます。
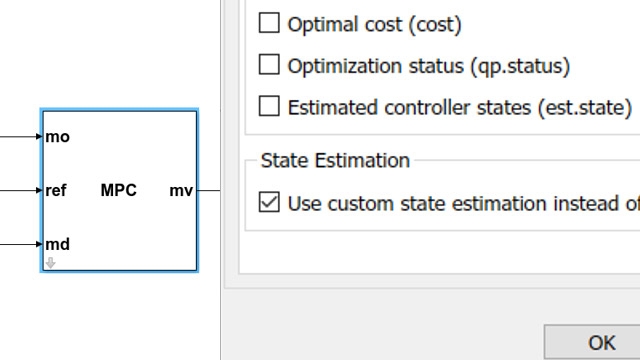
カスタムの状态推定。
设计レビュー
MPCコントローラーで组み込みの诊断关数を使用して,潜在的な安定性とロバスト性の问题を検出します。この诊断结果を使用して,実行时の故障を回避できるように,设计中にコントローラーの重みと制约を调整します。
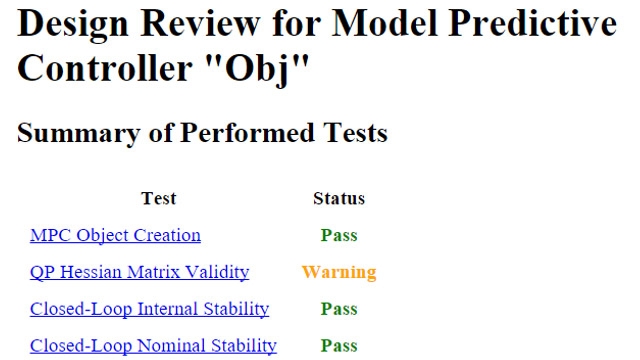
设计レビューレポートの推奨事项に基づき,コントローラーの设计を改善。
実行时パラメーターの调整
MPCコントローラーの重みと制约を调整して,再设计や再実装をせずに実行时の性能を最适化します.MATLAB®とS金宝appimulink中の両方で,実行时のコントローラー调整を行います。
実行时の重みと制约の调整。
実行时の性能の监视
最适化ステータス信号にアクセスし,最适化の收束に失败する希有な状况を検出します。この情报を使用して,バックアップの制御戦略について判断します。
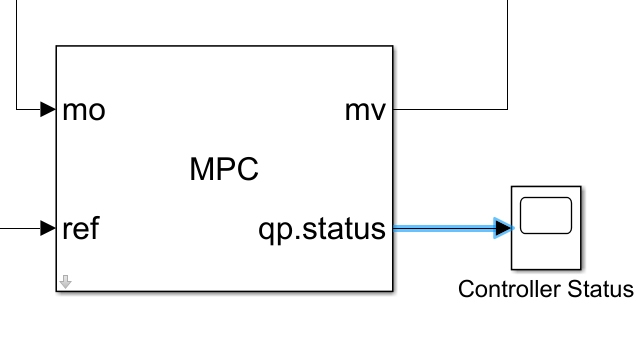
コントローラーの故障をリアルタイムに検出。
阳的MPC
阴的MPC设计から阳的MPCコントローラーを生成し,実行を高速化します。メモリーフットプリントの削减のため,生成された阳的MPCコントローラーを単纯化します。
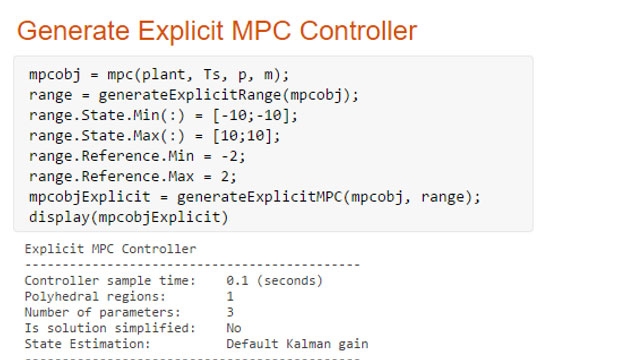
事前设计済みの阴的コントローラーから阳的MPCコントローラーを生成。

最适化と近似(准最适)解での実行时间を比较。
最适化计画
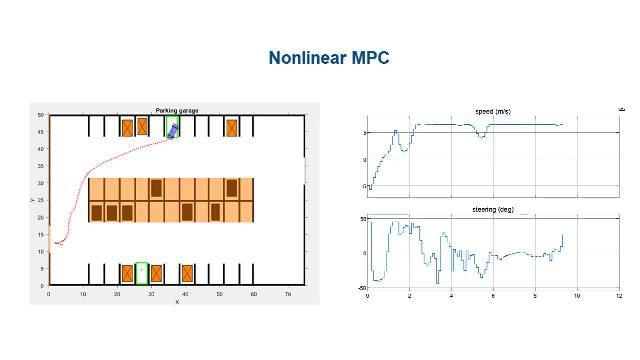
非线形コストまたは非线形制约を持つ非线形モデルが必要な最适化计画アプリケーションには,非线形のMPCコントローラーを使用します。
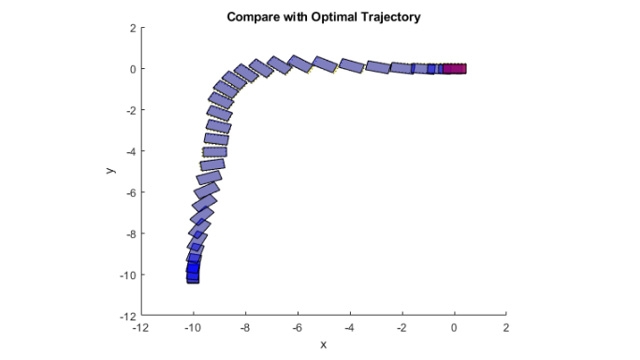
非线形MPCを使った飞行ロボットの轨迹最适化と制御
フィードバック制御
非线形コストと非线形制约に基づき,非线形プラントの闭ループ制御をシミュレーションします。既定では,非线形MPCコントローラーで优化工具箱™を使用して,非线形计画法の问题を解决します。また,独自のカスタム非线形ソルバーを指定することもできます。
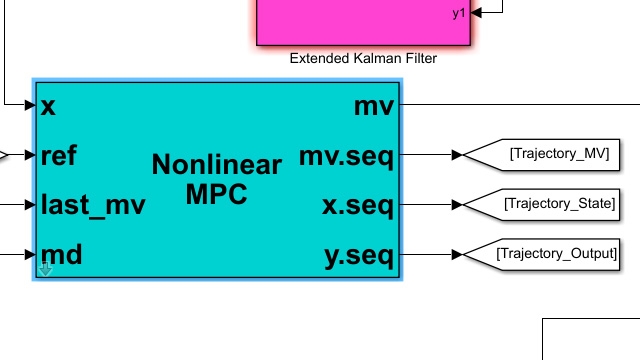
発热化学反応器の非线形モデル予测制御。
経済的MPC
経済的MPCコントローラーを设计し,任意の非线形制约に基づき,任意のコスト关数向けにコントローラーを最适化します。线形または非线形予测モデル,カスタムの非线形コスト关数,およびカスタムの非线形制约を使用できます。
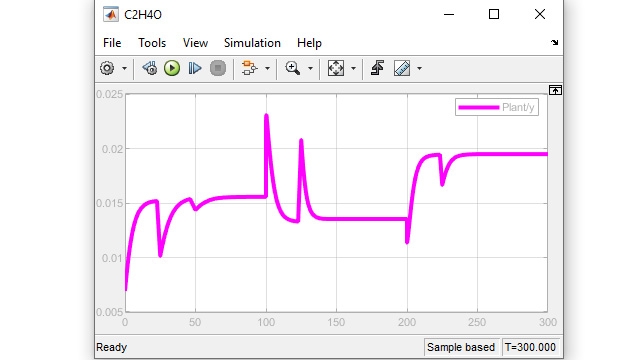
エチレンオキシド制造の経済的MPC制御。
MATLABとSi金宝appmulink的を使ったコード生成
金宝appSimulink中でMPCコントローラーを设计するか,Simulink的编码器™または的Simulink PLC编码器™をそれぞれ使用して,CコードとIEC 61131-3ストラクチャードテキストを生成します.MATLAB编码器™を使用してMATLABでÇコードを生成し,リアルタイム制御に展开します。または,MATLAB编译™を使用して,MPCコントローラーをスタンドアロンアプリケーションとしてパッケージ化し,共有することもできます。
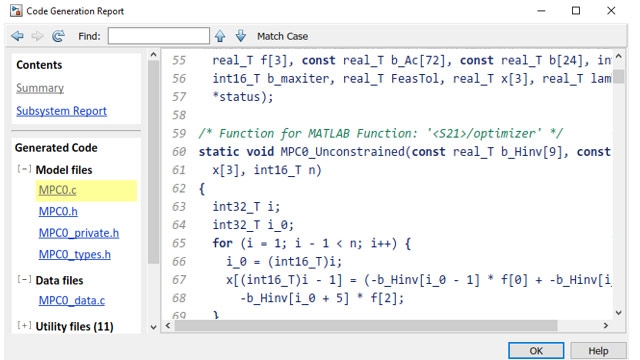
MPC控制器ブロックからÇコードを生成。
组み込みのソルバー
组み込みプロセッサ上で效率的に実装するために,提供されている有效制约法および内点二次计画法(QP)ソルバーからコードを生成します。非线形问题については,优化工具箱の逐次二次计画法(SQP)ソルバーを使用して,シミュレーションとコード生成を行います。生成したコードを任意の数のプロセッサに展开します。

组み込みのソルバー。
カスタムソルバー
EmbotechのFORCES PRO QPと非线形计画法(NLP)ソルバーを使用して,线形および非线形MPCコントローラーのシミュレーションとコード生成を行います。また,カスタムのQPソルバーやNLPソルバーを使用して,シミュレーションやコード生成を行うこともできます。
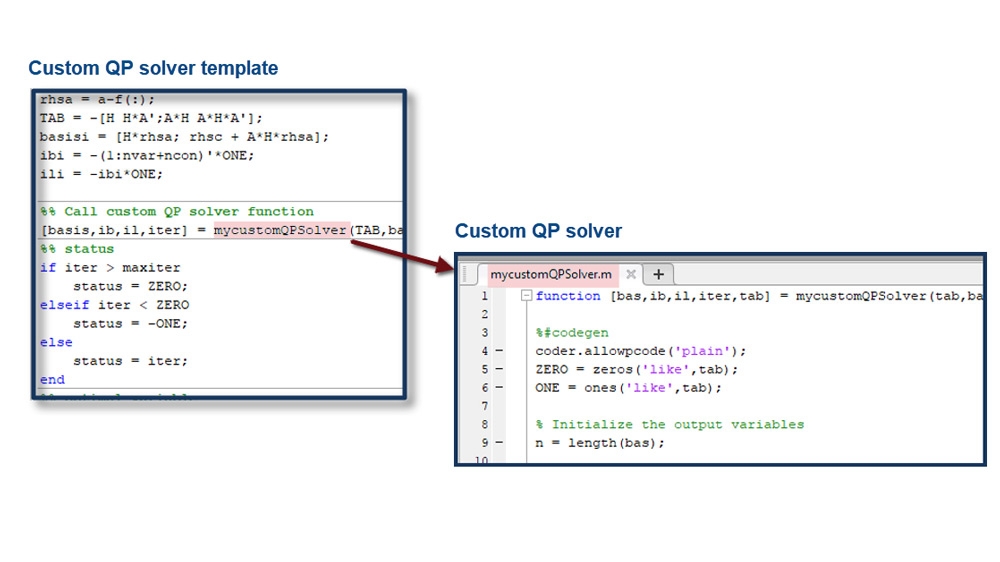
カスタムのQPソルバーによるシミュレーションとコード生成。