使用Simulink开发自动驾驶仪金宝app
从系列:MATLAB和Simu金宝applink机器人竞技场
克劳迪奥·康蒂,罗马大学
康奈尔大学D’索萨,MathWorks
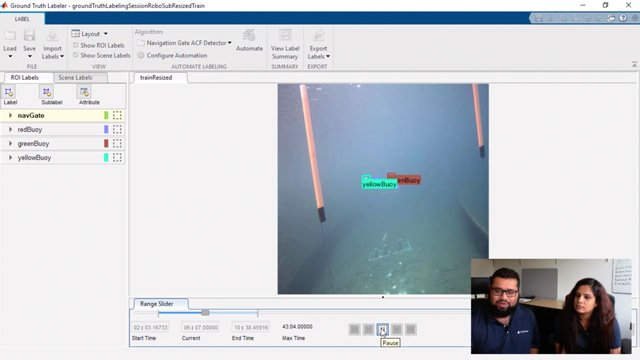
为了设计定制的自动驾驶仪,克劳迪奥·康蒂罗马Sapienza大学的Sapienza飞行团队与MathWorks的Connell D 'Souza一起讨论了如何使用基于模型的设计来开发定制的自动驾驶仪。萨皮恩扎飞行队参加AUVSI学生无人机比赛(SUAS)小组设计自主的固定翼或旋翼飞机来执行搜索和侦察任务。
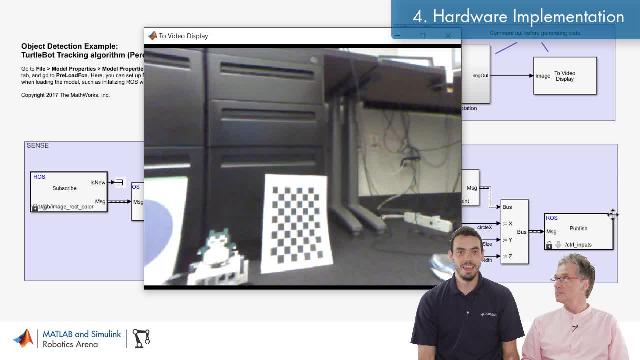
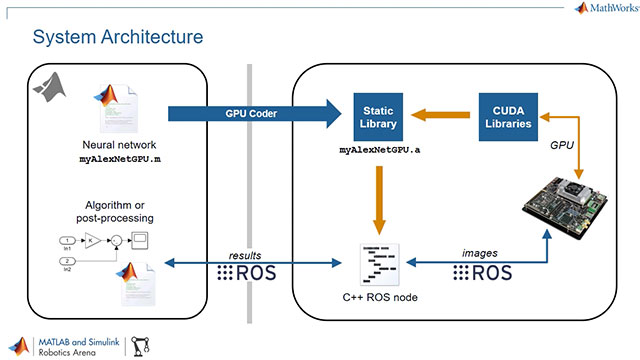
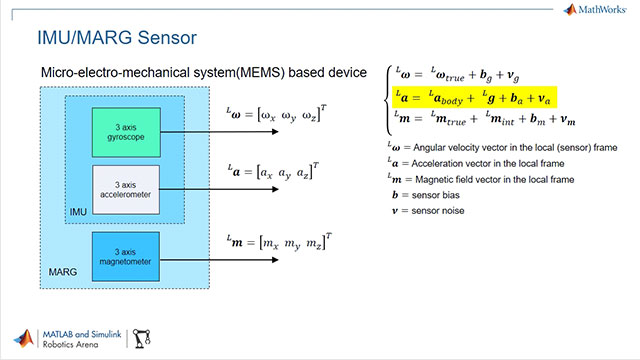
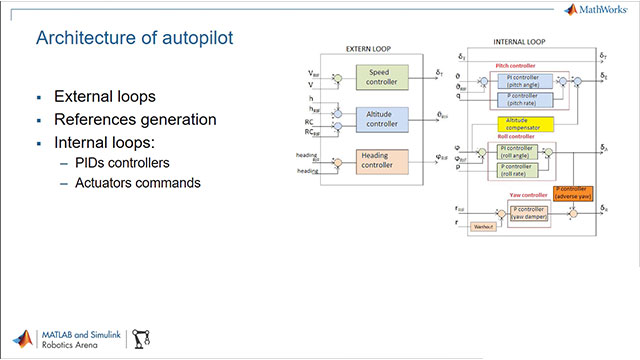
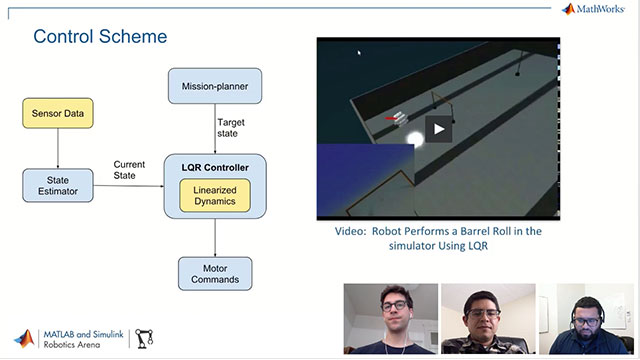
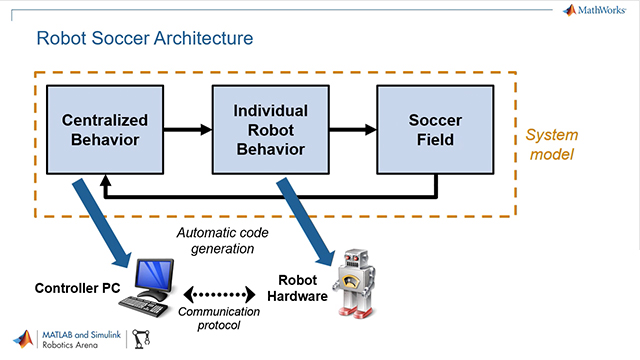
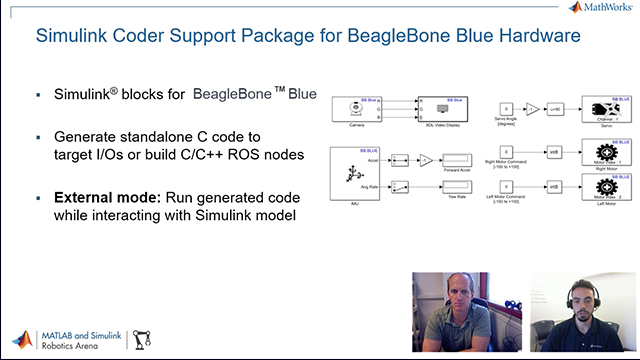
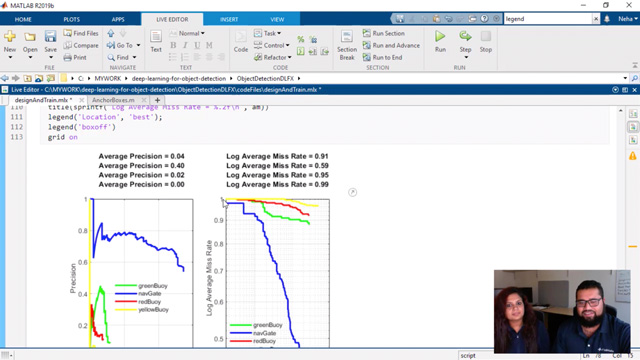
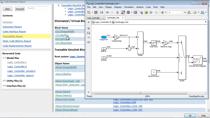
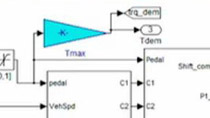
在演示他们如何使用Simulink之前,Claudio将在他的自定义自动驾驶仪中解释架构和控制策略金宝app®开发自动驾驶仪模型。他的团队创建S-functions接口与飞机不同的传感器,以及编码和解码MAVLink地面站与自动驾驶仪通信的消息之前,使用仿真软件中的代码生成功能部署到一个定制的设备箱Arduino的组成金宝app®Due和Raspberry Pi™通过串行连接。
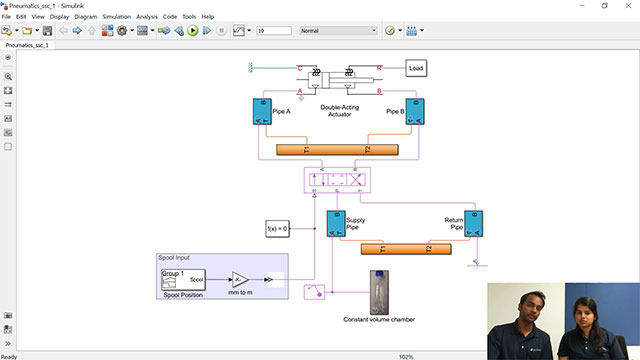
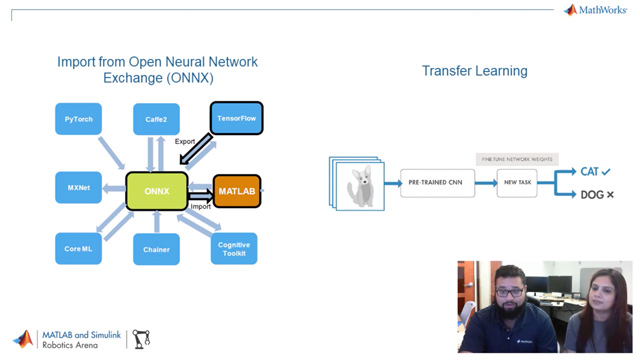
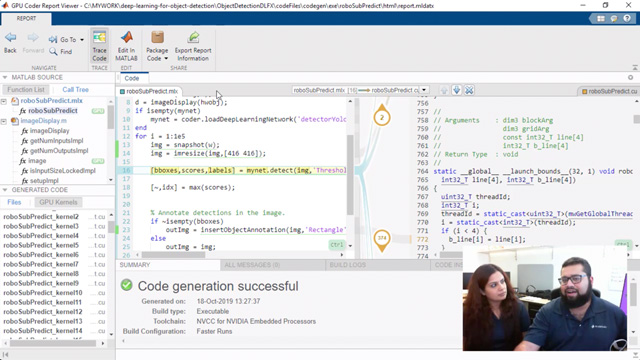
为了模拟这种自动驾驶仪,Claudio和他的团队采用了实时半环硬件模拟技术dSPACE®实时机器.他们使用Aerospace Blockset™在Simulink中建模他们的飞机、环境和传感器,然后将其部署到dSPACE实时机器上金宝app实时接口.这种模拟包括在dSPACE机器上运行的飞机、环境和传感器模型,在航空电子盒上运行的自动驾驶仪,QGroundControl和FlightGear飞行模拟器在台式机上可视化轨迹,MAVLink用于不同节点之间的通信。
额外的资源:
产品集中
其他资源















下一个系列
相关视频和网络研讨会

















你也可以从以下列表中选择一个网站: