Simulink和ROS入门金宝app
从系列中:MATLAB与Simu金宝applink机器人竞技场
塞巴斯蒂安·卡斯特罗
Pulkit Kapur, MathWorks
Sebastian Castro和Pulkit Kapur讨论了如何将Simulink®与机器人操作系统(金宝appROS)结合使用。
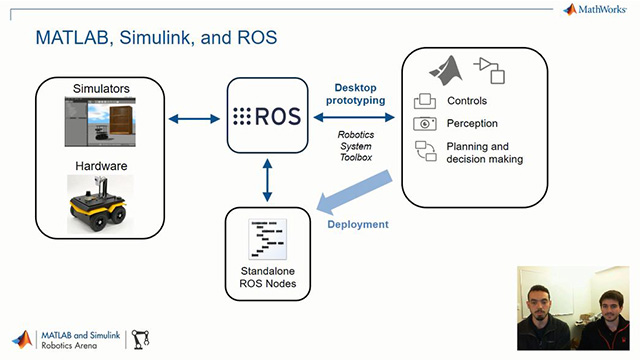
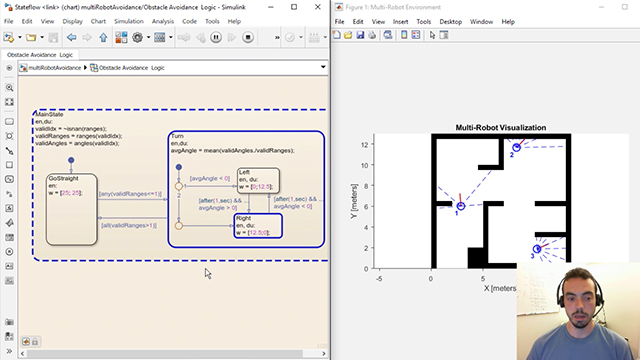
首先,Sebastian和Pulkit介绍了使用机器人系统工具箱™连接Simulink和ROS的工作流程。金宝app您将学习一些软件特性、模板和最佳实践,以帮助您在Simulink中实现常见的ROS编程构造。金宝app您还将学习如何结合MATLAB, Simulink和statflow®作为Simuli金宝appnk块图中的不同类型算法的建模工具。
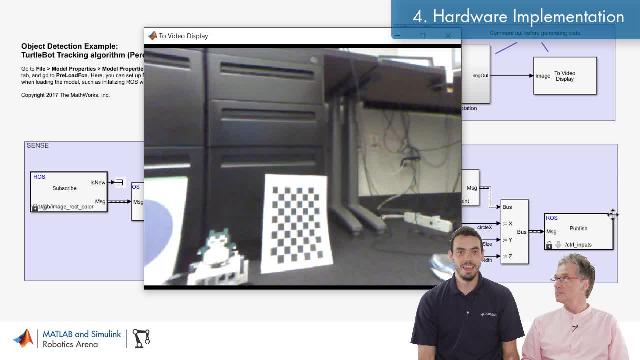
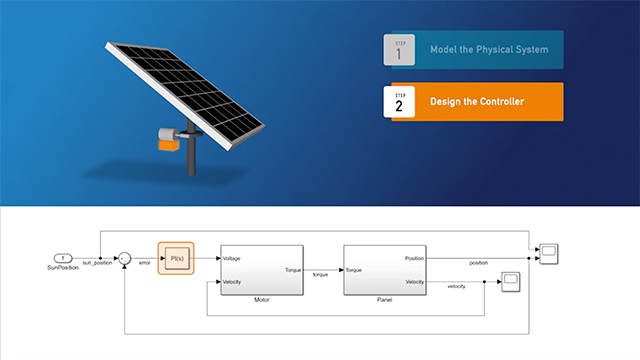
最后,您将通过一个自治对象跟踪示例看到上述概念的演示。此示例使用Simulink和机器人系统工具箱实现最佳实践。通过实际和仿真实验,说明了MATLAB和ROS的模块性金宝app海龟®机器人平台,以及网络摄像头。R2019b中引入了两种新产品,以补充机器人系统工具箱的功能:导航工下载188bet金宝搏具箱和ROS工具箱。
有关更多信息,请查看以下资源:
- 下载所有模板和示例文件MATLAB中央文件交换
- 了解更多关于用MATLAB和Simulink对机器人进行编程金宝app















下一个系列
相关视频和网络研讨会













你也可以从以下列表中选择一个网站: