主要内容
双车道改变
双线变道3D环境
描述
的双车道改变scene是一个包含圆锥体、交通标志和桶状物的笔直道路的3D环境。这些锥是为了让车辆进行双车道变换而设置的。场景是使用虚幻引擎渲染的®从史诗般的游戏®.

例子
探索双变道场景
探索3D双车道变道场景,并使用相应的2D顶部视图图像检查其尺寸。
你可以使用这个图像在模拟之前检查场景,并为车辆选择开始坐标。有关使用这些图像为路径跟踪应用程序选择路径点的详细信息,请参阅为虚幻引擎模拟选择路径点的例子。
加载与场景相对应的2D空间引用对象。这imref2d对象描述了图像中的像素与场景的世界坐标之间的关系。
data =负载(“sim3d_SpatialReferences.mat”);spatialRef = data.spatialReference.DoubleLaneChange
spatialRef = imref2d with properties: XWorldLimits: [- 130.55500 783.3500] YWorldLimits: [-456.1500 457.7500] ImageSize: [4845 4845] PixelExtentInWorldX: 0.1886 PixelExtentInWorldX: 0.1886 ImageExtentInWorldX: 913.9000 ImageExtentInWorldX: 913.9000 XIntrinsicLimits: [0.5000 4.8455e+03]
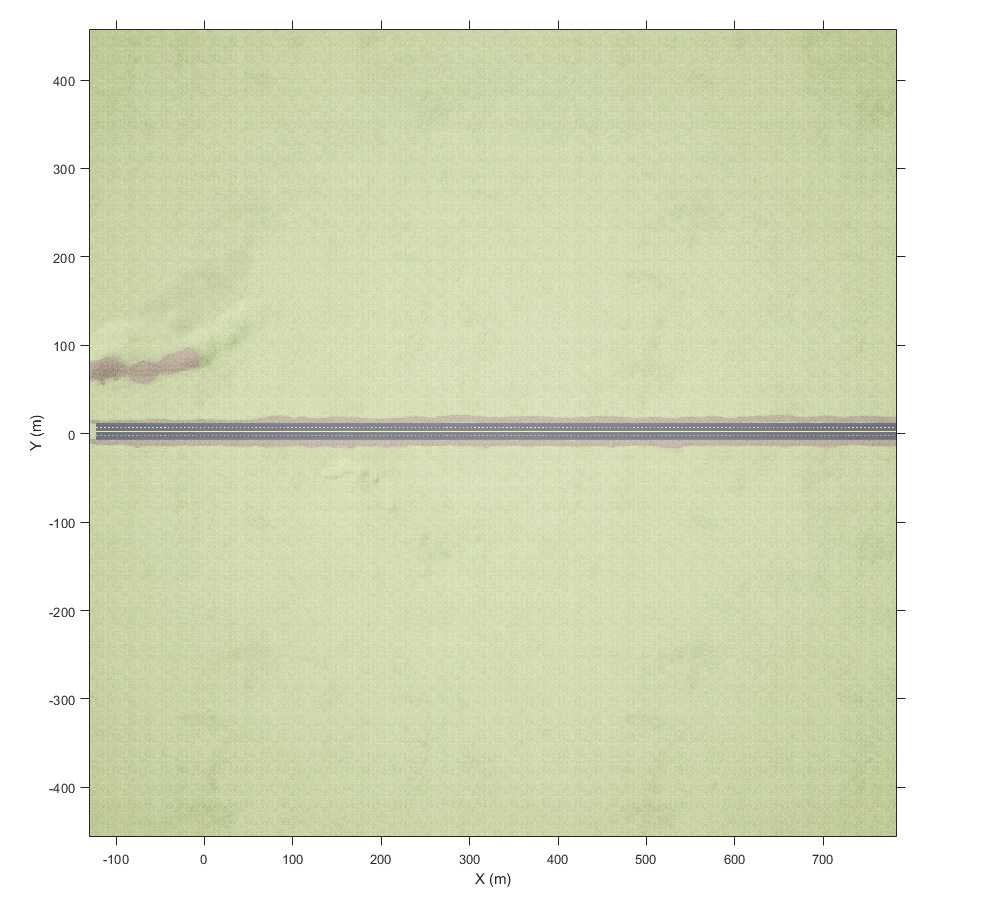
显示与场景相对应的图像。使用空间参考对象来显示场景世界坐标中的坐标轴。单位是米。
默认情况下,imshow功能显示Y-轴值从上到下递增。要与自动驾驶工具箱™世界坐标系统对齐,请设置Y方向,“正常”这Y-axis值从下往上增加。
该图像只显示了包含停车场的场景区域。整个场景的长度和宽度为2016米。
图文件名=“sim3d_DoubleLaneChange.jpg”;I = imshow(文件名,spatialRef);集(gca),“YDir”,“正常”)包含(“X (m)”) ylabel (“Y (m)”)
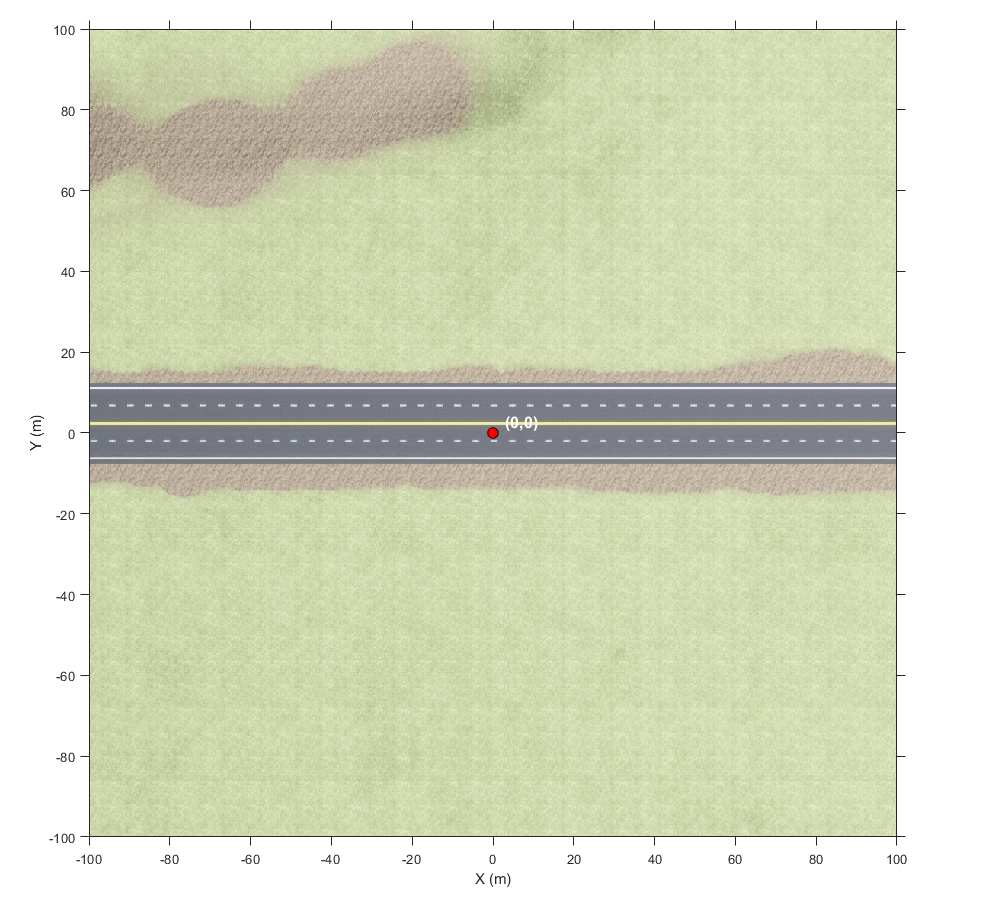
放大场景的原点。在原点处做个标记。如果你将车辆放置在现场原点,并设置车辆的偏航角为0时,执行双变道机动的交通锥位于车辆正前方。
Xlim ([-100 100]) ylim([-100 100])保持在情节(0,0,“o”,“MarkerFaceColor”,“r”,“MarkerEdgeColor”,“k”,“MarkerSize”,8) offset = 3;% px文本(偏移,偏移量,' (0, 0) ',“颜色”,' w ',“FontWeight”,“大胆”,“字形大小”, 12)从
提示
如果你有虚幻引擎4项目的自动驾驶工具箱™接口金宝app支持包,然后你可以修改这个场景。在支持包附带的虚幻引擎项目文件中,这个场景被命名为金宝app
DblLnChng.有关自定义场景的详细信息,请参见为自动驾驶定制虚幻引擎场景.
另请参阅
介绍了R2019b
你也可以从以下列表中选择一个网站:
