主要内容
停车场
停车场3D环境
描述
这停车场场景是停车场的3D环境。使用虚幻引擎呈现场景®来自史诗般的游戏®。
模拟A.驾驶算法在这个场景中:
添加A.仿真3D场景配置块到您的simulink金宝app®模型。
在这个块中,设置了场景来源参数到
默认场景。设置启用场景名称参数到
停车场。
探索停车场场景
探索3D停车场场景,并通过使用场景的相应的2D顶视图图像检查其尺寸。
您可以使用此图像在模拟前检查场景,并选择用于车辆的起始坐标。有关使用这些图像的详细信息,为路径跟踪应用程序选择航点,请参阅选择虚幻引擎模拟的航点例子。
加载对应于场景的2D空间引用对象。这imref2d.对象描述了图像中的像素与场景的世界坐标之间的关系。
data = load('sim3d_spatialreferences.mat');spatialref = data.spatialReference.Parkinglot.
spatialRef = imref2d与属性:XWorldLimits:-195.5000 8.9000] YWorldLimits:-27.1000 177.3000] IMAGESIZE:[4845 4845] PixelExtentInWorldX:0.0422 PixelExtentInWorldY:0.0422 ImageExtentInWorldX:204.4000 ImageExtentInWorldY:204.4000 XIntrinsicLimits:0.5000 4.8455e + 03] YIntrinsicLimits:0.5000 4.8455E + 03]
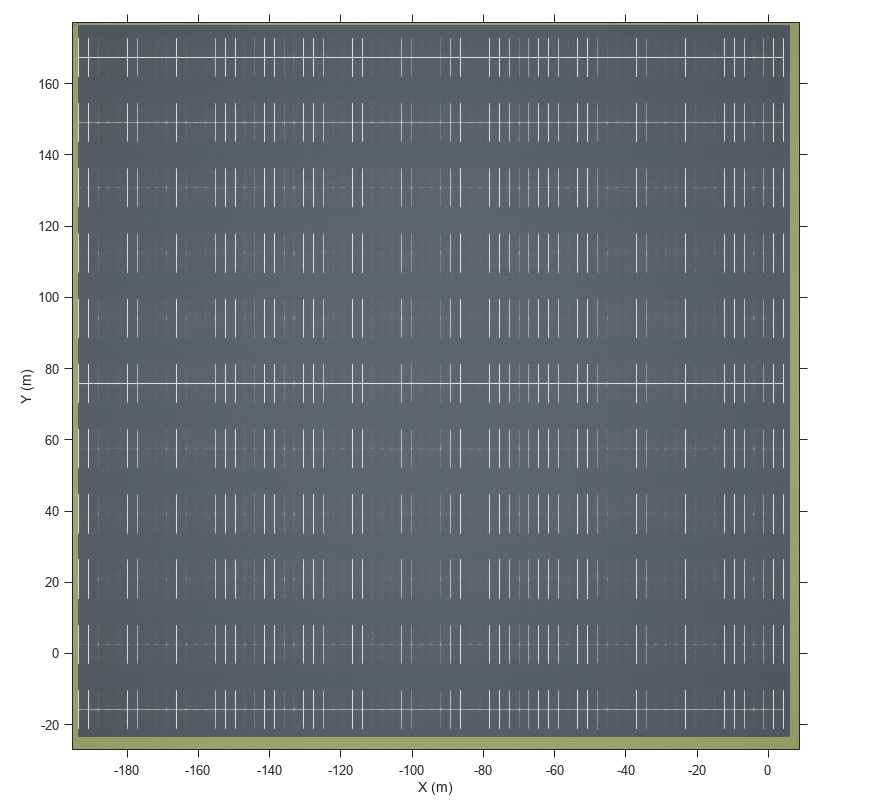
显示对应于场景的图像。使用空间引用对象在场景的世界坐标中显示轴。单位是米。
默认情况下,imshow.功能显示y- 从上到下增加的值。要与自动化驾驶工具箱™世界坐标系保持,请设置y- 向往'普通的'以便y-axis值从底部到顶部增加。
图像仅显示包含停车场的场景区域。完整的场景的长度和宽度为705.6米。
图文件名='sim3d_parkinglot.jpg';i = imshow(filename,spatialref);套装(GCA,'ydir'那'普通的')Xlabel('x(m)')ylabel('y(m)')
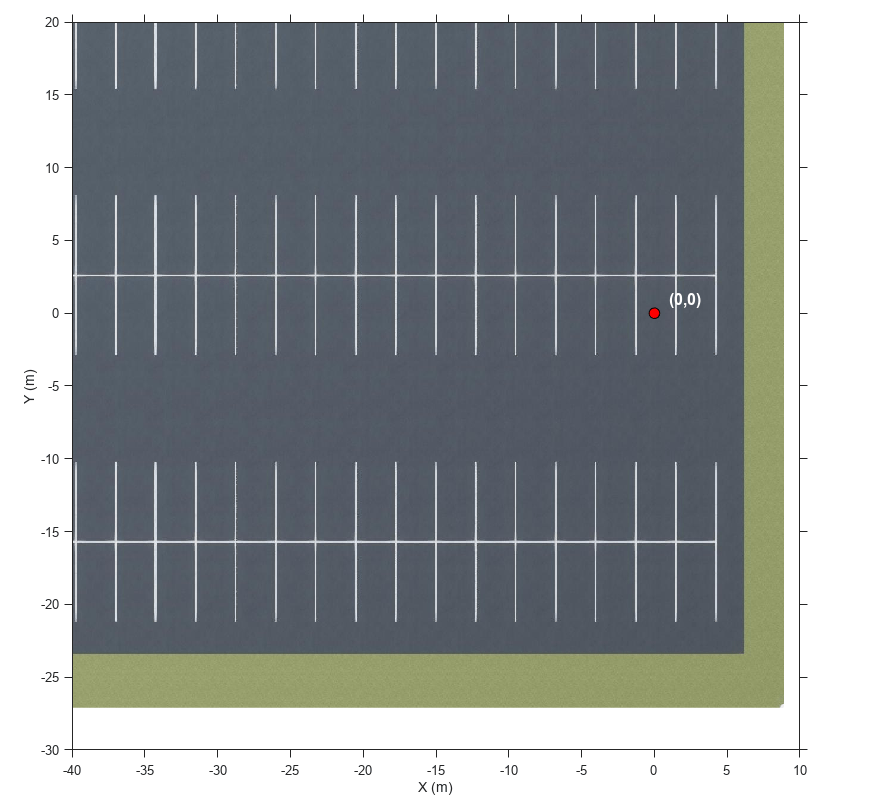
放大场景的起源。将标记放在原点。
XLIM([ - 40 10])ylim([ - 30 20])保持上绘图(0,0,'o'那'markerfacecolor'那'r'那'markeredgecolor'那'K'那'Markersize',8)offset = 1;%px.文本(偏移,偏移,'(0,0)'那'颜色'那'W'那'fontweight'那'大胆的'那'字体大小',12)持有离开
尖端
如果你有用于虚幻引擎4项目的自动化驾驶工具箱™接口金宝app支持包,然后您可以修改此场景。在带支持包附带的虚幻引擎项目文件中,此场景被命名金宝app
简单。有关自定义场景的更多详细信息,请参阅自定义自动驾驶的虚幻引擎场景。
您还可以从以下列表中选择一个网站:
