Mobile Robot Algorithm Design
Mapping, path planning, path following, state estimation
These Robotics System Toolbox™ algorithms focus on mobile robotics or ground vehicle applications. These algorithms help you with the entire mobile robotics workflow from mapping to planning and control. You can create maps of environments using occupancy grids, develop path planning algorithms for robots in a given environment, and tune controllers to follow a set of waypoints. Perform state estimation based on lidar sensor data from your robot.
Functions
Blocks
| Ackermann Kinematic Model | Car-like vehicle motion using Ackermann kinematic model |
| Bicycle Kinematic Model | Compute car-like vehicle motion using bicycle kinematic model |
| Differential Drive Kinematic Model | Compute vehicle motion using differential drive kinematic model |
| Unicycle Kinematic Model | Compute vehicle motion using unicycle kinematic model |
| Pure Pursuit | Linear and angular velocity control commands |
Topics
Mapping and Path Planning
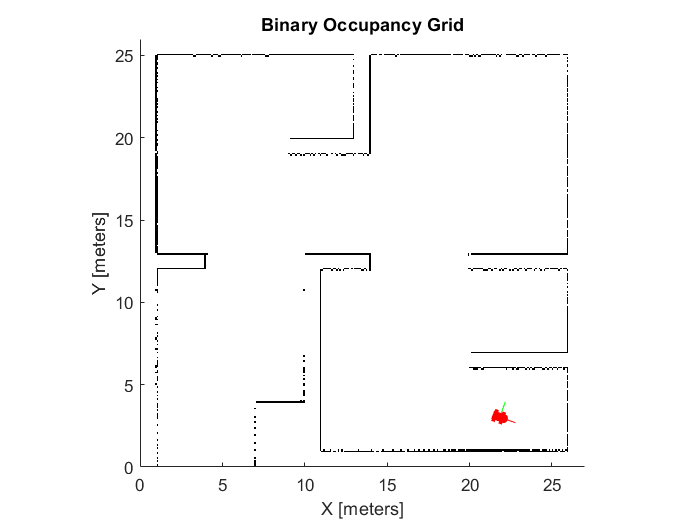
- Occupancy Grids
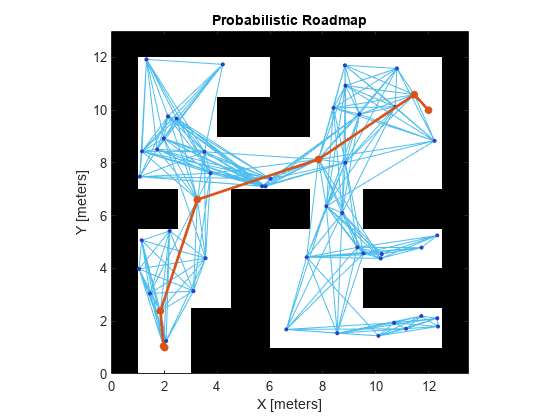
Details of occupancy grid functionality and map structure. - Probabilistic Roadmaps (PRM)
How the PRM algorithm works and specific tuning parameters. - Path Planning in Environments of Different Complexity
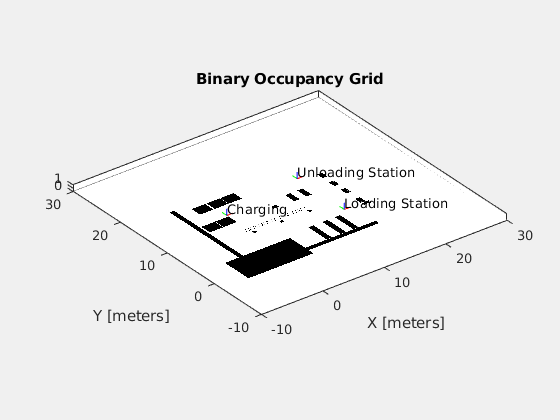
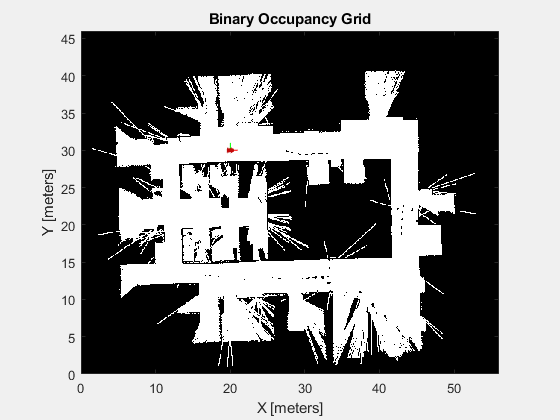
This example demonstrates how to compute an obstacle-free path between two locations on a given map using the Probabilistic Roadmap (PRM) path planner. - Mapping with Known Poses
This example shows how to create a map of an environment using range sensor readings and robot poses for a differential drive robot. - Plan Path for a Differential Drive Robot in Simulink
This example demonstrates how to execute an obstacle-free path between two locations on a given map in Simulink®.
Motion Modeling
- Mobile Robot Kinematics Equations
Learn details about mobile robot kinematics equations including unicycle, bicycle, differential drive, and Ackermann models. - Simulate Different Kinematic Models for Mobile Robots
This example shows how to model different robot kinematics models in an environment and compare them.
Robot Control
- Pure Pursuit Controller
Pure Pursuit Controller functionality and algorithm details. - Path Following for a Differential Drive Robot
This example demonstrates how to control a robot to follow a desired path using a Robot Simulator. - Control a Differential Drive Robot in Gazebo with Simulink
This example shows how to control a differential drive robot in Gazebo co-simulation using Simulink.
State Estimation
- Particle Filter Parameters
To use thestateEstimatorPFparticle filter, you must specify parameters such as the number of particles, the initial particle location, and the state estimation method. - Particle Filter Workflow
A particle filter is a recursive, Bayesian state estimator that uses discrete particles to approximate the posterior distribution of the estimated state. - Track a Car-Like Robot Using Particle Filter
Particle filter is a sampling-based recursive Bayesian estimation algorithm, which is implemented in thestateEstimatorPFobject.
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- 丹麦(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)