主要内容
pcfromkinect
点云Kinect对于视窗
语法
描述
例子
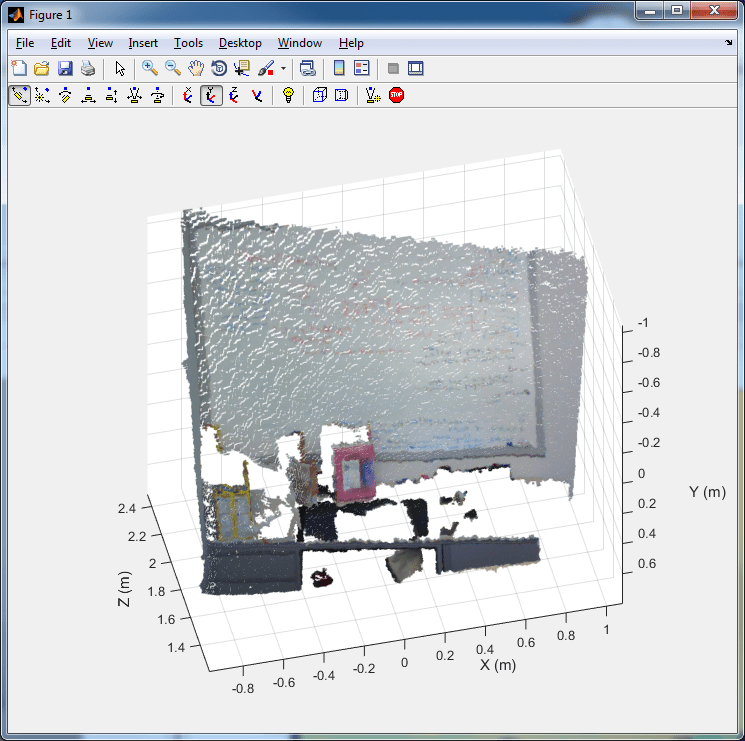
绘制颜色点云Kinect对于视窗
从Kinect图像绘制彩色点云。此示例需要图像采集工具箱软件和Kinect摄像机以及与摄像机的连接。
创建一个系统对象™ 用于彩色设备。
colorDevice=imaq.VideoDevice(“kinect”,1)
为深度设备创建一个系统对象。
depthDevice=imaq.VideoDevice(“kinect”,2)
初始化相机。
步骤(彩色装置);步骤(深度装置);
从设备加载一帧。
Colorimage =步骤(Colordevice);DemageImage =步骤(深度);
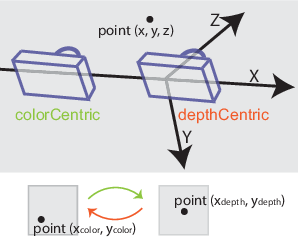
提取点云。
ptCloud=pcfromkinect(深度设备、深度图像、彩色图像);
初始化点云播放器以可视化三维点云数据。适当设置轴以从Kinect可视化点云。
player=pcplayer(ptCloud.XLimits、ptCloud.YLimits、ptCloud.ZLimits、,...'verticalaxis',“是的”,“垂直方向”,'下'); xlabel(player.Axes,'x(m)'); ylabel(player.Axes,'y(m)'); 兹拉贝尔(player.Axes,‘Z(m)’);
获取并查看500帧动态Kinect点云数据。
对于i=1:500彩色图像=阶跃(彩色设备);深度图像=步骤(深度设备);ptCloud=pcfromkinect(深度设备、深度图像、彩色图像);视图(播放器、云端);结束
释放对象。
发布(Colordevice);释放(深度);
输入参数
输出参数
另见
去噪|下采样|pcfitplane|PCMerge.|pcplayer|pcread|pcregistericp|pcshow.|PCWRITE.|平面模型|情节3|点云|重建场景|分散的3|三角化
在R2015B中介绍
您还可以从以下列表中选择一个网站:
