主要内容
pcshowpair.
可视化两个点云之间的差异
描述
斧头= pcshowpair(___)
例子
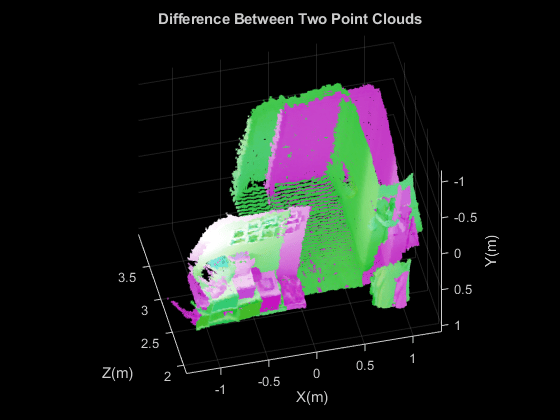
可视化两个点云之间的差异
负载在家庭设置中使用Kinect设备捕获的两个点云。
加载('客厅');PC1 = Livingroomdata {1};PC2 = Livingroomdata {2};
绘图并设置点云的角度。
图pcshowpair(pc1,pc2,'verticalaxis'那'是'那'verticalaxisdir'那'下') 标题(“两点云之间的区别”)Xlabel('x(m)')ylabel('y(m)')Zlabel('z(m)')
输入参数
输出参数
尖端
提高性能,
pcshowpair.在与图形的交互期间自动卸下呈现的点云。下采样仅发生用于渲染点云并不会影响保存的点。要查看点数据或修改颜色显示值,请将鼠标悬停在轴上,然后选择以下选项之一。
特征 描述 数据 点击数据提示查看点云图中任何点的数据点值。对于正常点云,数据提示显示X那y那Z.价值观。深度图像和LIDAR的其他数据属性是:
点云数据 数据值属性 深度图像(RGB-D传感器) 颜色,行,列 莱达 强度,范围,方位角,仰角,行,列 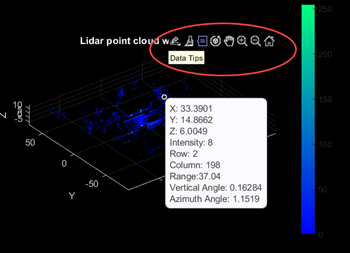
背景颜色 点击旋转然后右键单击图形选项。

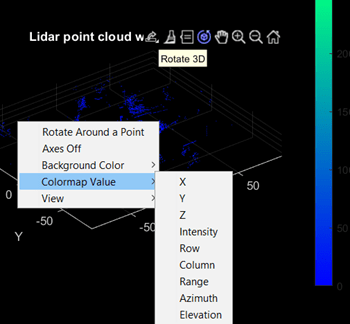
Colormap值 点击旋转然后右键单击图形以获取ColorMap选项。您可以根据显示的点云的类型修改可用的坐标和范围值的Colornap值。
看法 点击旋转改变点云图的视角XZ.那ZX.那yz.那ZY.那XY., 或者yx.飞机。点击恢复视图重置视角。

pcshowpair.金宝app支持'OpenGL'选择渲染器数字只有财产。




也可以看看
pcdenoise.|pcdownsample.|PCFitplane.|PCMerge.|PCPlayer.|p|Pcregistericp.|pcshow.|PCWRITE.|PlaneModel.|Plot3.|pointcloud.|重建科学|散射3.|三角化
在R2015B中介绍
您还可以从以下列表中选择一个网站:
