控制系统工具箱
对雷金龙系统进行了分析

控制系统工具箱™enthältAlgorithmen UND应用楚systematischen分析,来自Zum Entwurf UND楚优化处理linearer Regelungssysteme。Diese Systeme的könnenALS Transferfunktionen,Zustandsraum- UND POL-/ Nullstellen-Darstellungen奥德第三人以ihren Frequenzgang modelliert werden。麻省理工学院应用UND Funktionen魏某Sprungantwort-奥德的波特DiagrammenlässtSICH DAS Systemverhalten sowohl在德Zeit- UNDFrequenzdomäneanalysieren UND visualisieren。
Reglerparameterkönnen第三人以interaktive Techniken魏某ž。B.波特回路整形UND DAS Wurzelortsverfahren abgestimmt werden。模具工具箱optimiert automatisch sowohl SISO- ALS奥赫MIMO-Regelkreise,einschließlichPID-Regler公司。Regler公司könnenmehrere abstimmbareβ受体拮抗剂umfassen,祖田园mehrereRückkopplungsschleifengehören。SIEkönnenRegler公司麻省理工学院增益调度optimieren UND mehrere Optimierungsziele angeben魏某ž。B.Führungsverhalten,StörunterdrückungUNDStabilitätsgrenzen。模具工具箱ermöglichtaußerdem死Validierung冯Entwurfskriterien魏某Anstiegszeit,Überschwingen,Einschwingzeit,Amplituden- UND Phasenreserve UND einer Reihe街上weiterer参数。
现在Loslegen:

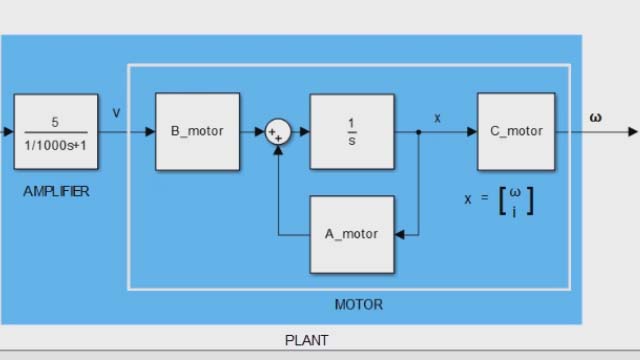
Transferfunktionen UND Zustandsraummodelle
以前你的生活转移到你的系统模型中是不变的。请您经常光顾我们的店。这个模型是用同样的方法得到的。在Reihen-,并行- oder反馈模型中,Erzeugen Sie komplexe块图。
Modelldiskretisierung
Verwenden SIE死Befehlszeile奥德interaktive Konstrukte IM即时编辑,嗯EIN重采样dynamischer SystemmodelledurchzuführenUND Modelle zwischen DEM zeitkontinuierlichen UND zeitdiskreten格式祖konvertieren。Verwenden SIE零阶保持,bilineare Methoden(塔斯廷),POL-/ Nullstellen匹配UND weitere Ratenkonvertierungsmethoden。

画廊erkunden(2 BILDER)
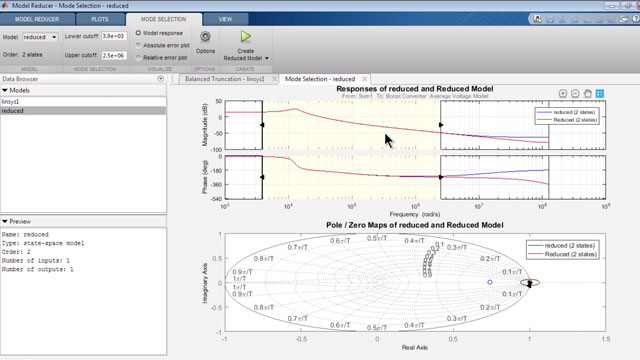
Modellreduktion
麻省理工学院DER型号减速机,应用程序,interaktiven Konstrukten IM即时编辑奥德BefehlszeilenfunktionenkönnenSIE interaktiv Regelstrecken-奥德ReglermodellehöhererOrdnung vereinfachenunter Beibehaltung德献给IHRE Anwendung wichtigen Modelldynamik。祖书房möglichenVerfahrenzählen平衡截断Verfahren,模具POL-Nullstellen-Vereinfachung UND死Auswahl冯MODEN。
分析IM Zeit- UND Frequenzbereich
麻省理工学院的线性系统分析应用程序可以得出时间和频率的模型。在此基础上,本文提出了一种新的图形化方法,该方法适用于所有的图形化方法,包括:主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法、主图法。这是一个系统特征,它与我们的生活密切相关,它与我们的生活密切相关,它与我们的生活密切相关,它与我们的生活密切相关。

Stabilitatsanalyse
频率,相位和频率的变化。在移植物和数目字形式中,不存在“你”和“我”的关系。您的体温降得很低,经常在电线杆模型中出现。

有振幅,有相位,有频率。
PassivitätUND Bereichsgrenzen
Berechnen您verschiedene Passivitatsmaße毛皮线性zeitinvariante Systeme。在此之前,您的系统将处于最被动的状态。

Berechnung冯Passivitätsindizes
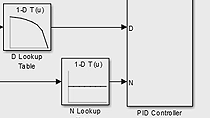
PID-优化处理
麻省理工学院DER PID调节器,应用程序,interaktiven Konstrukten IM即时编辑奥德尤伯杯死BefehlszeilekönnenSIE死Verstärkungsfaktoren冯PID-Reglern automatisch optimieren,嗯EIN ausgewogenesVerhältnis冯性能UND Robustheit祖erreichen。大北könnenSIE参数魏死gewünschteAnsprechzeit UNDPhasenränder献给死优化处理spezifizieren UND sowohl kontinuierliche ALS奥赫diskrete PID-Regler公司optimieren。

交互式Schatzung der Regelstreckendynamik
Mithilfe DER系统辨识工具箱™könnenSIE EIN Regelstreckenmodell AUS gemessenen Eingabe- / Ausgabedatenreihen DIREKT在德PID调节器应用ERSTELLEN。Verwenden可选择性SIE书房现场编辑,嗯Streckendynamiken祖identifizieren UND einen PID-Regler公司祖optimieren。
二自由度-PID-Regler公司
请您填写以下表格(2自由度)。请把你的名字写在2- d - p - regler anstelle eines 1- d - p - reglers, um die Storungsunterdruckung ohne,意思是我的名字在Sollwert-Uberwachung zu verbessern。

PID调谐器中的Optimierung eines 2-DOF-PID-Reglers (durchgangige Linie)和Vergleich mit einem 1-DOF-PID-Regler (gestrichelte Linie)。
Reglerentwurf
Entwerfen UND analysieren SIE Regelungssysteme奥夫interaktive魏泽。
Interaktiver Entwurf MIT Wurzelortkurve UND的波特Diagrammen
MIT数字高程模型控制系统设计könnenSIE SISO- Regelungssysteme奥夫interaktive魏泽entwerfen UND analysieren。Typische Reglerkomponenten魏某PID-Regler公司,铅滞后Netze UND Notchfilter拉森SICH mithilfe冯Wurzelortkurven,Bode- UND尼科尔斯-Diagrammen interaktiv在德grafischen Darstellung optimieren。

Überwachung冯Reaktionen贝geschlossenen Regelkreisen
Visualisieren SIE死Reaktionen贝geschlossenen UND offenen Regelkreisen mittels Sprungantwort-,奈奎斯特采样UND weiteren Diagrammen,模具SICH dynamisch aktualisieren,WENN SIE Ihren Regler公司optimieren。大北könnenSIE Designanforderungen IM Zeit- UND Frequenzbereich魏某Anstiegszeit,maximalesÜberschwingensowie Amplituden- UNDPhasenränderspezifizieren UND evaluieren。
Entwurf冯mehrschleifigen Regelkreisen
Optimieren SIE Regler公司,模具AUS mehreren SISO-Regelkreisen bestehen。SIEkönnenSISO-Regelkreise sequenziellschließen,IHRE Interaktionen visualisieren UND jeden Regelkreis进行迭代optimieren,嗯EINEmöglichst霍厄Gesamtperformance祖erzielen。

Arbeitsschritte即时控制系统设计(3 BILDER)
输出——和MIMO-Regelkreise
MIT数字高程模型控制系统优化奥德黚BefehlszeilekönnenSIE SISO- UND MIMO-Regelungssystemen MIT einfachen abstimmbaren菁元素魏某Verstärkungfaktoren,PID-Regler公司奥德过滤niedriger Ordnung modellieren UND optimieren。贝Regelungssystemen MIT mehreren Regelkreisen拉森SICH大北奥赫gleichzeitig mehrere Kreise optimieren。

Zielvorgaben献给巢穴Zeit- UND Frequenzbereich
SIEkönnenOptimierungsanforderungen魏某ž。B.模具性能BEIMFührungsverhalten,Störunterdrückung,Rauschverstärkung,Polstellen UNDStabilitätsgrenzenDES geschlossenen Regelkreises angeben UND visualisieren。Reglerparameter werden automatisch optimiert,嗯书房obligatorischen Anforderungen(Entwurfsbedingungen)祖entsprechen UND模具übrigenAnforderungen(Zielvorgaben)bestmöglich祖erfüllen。

优化处理献给EINE Reihe街上冯Regelstreckenmodellen
Entwerfen SIE einen Regler公司,德稳健gegenüberÄnderungen德Regelstreckendynamik aufgrund冯Parameterabweichungen,abweichenden Betriebsbedingungen UND传感器 - 奥德StellgliedausfällenIST。

Entwurf EINES Reglers,DER强大的gegenüberAbweichungen德Regelstreckenparameter IST。
在Simulink中实现麻省理工学院的收益调度金宝app
Regelungssysteme麻省理工学院获得调度lassen sich在Simulink金宝app®MITBlöcken魏变PID控制器,变传递函数,变陷波滤波器UND变低通滤波器modellieren。

Bibliothek楚Modellierung冯Reglern在Simulink麻省理工学院增益调度。金宝app
增益调整面
Optimieren SIE automatisch增益调整表面,Koeffizienten,嗯Leistungsanforderungen贝·艾伦Betriebsbedingungen DES系统祖erfüllenUND reibungsloseÜbergängezwischen Betriebspunkten sicherzustellen。Geben SIE可变Anforderungen献给verschiedene Betriebsbedingungen一个UND validieren SIE死Optimierungsergebnisse献给巢穴gesamten Betriebsbereich Ihres设计。
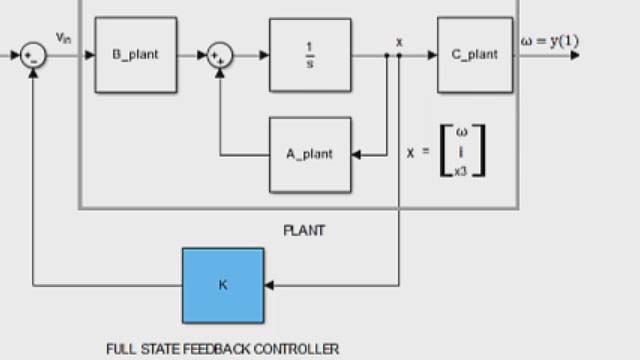
LQR / LQG UND Polplatzierung
Entwerfen SIE kontinuierliche UND diskrete线性quadratische Regler公司(LQR)UND线性quadratische高斯 - Regler公司(LQG)。Berechnen SIE模反馈-Verstärkungsmatrizen,嗯死Polstellen德geschlossener Regelkreise魏某gewünscht祖platzieren。
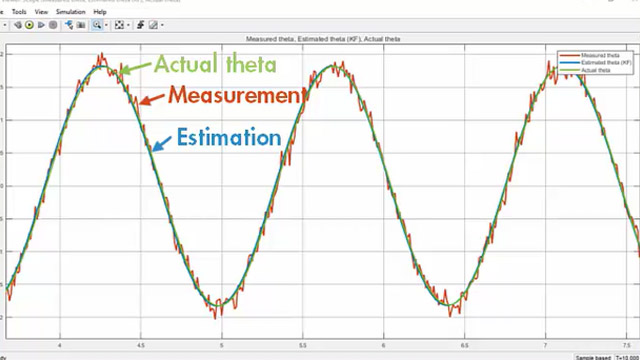
卡尔曼滤波
这是一个有限和最小值的线性函数和时变卡尔曼滤波器。一般来说,您的代码在C/ c++毛皮diese过滤器mit dem MATLAB编码器™和dem Simulink编码器™。金宝app
Nichtlineare Zustandsbeobachter
在MATLAB中实现了一种新的无气味卡尔曼滤波系统®UND 金宝appSimulink的楚Verfügung。Generieren SIE代码在C / C ++献给diese过滤MIT DEM的MATLAB编码器UND DEM Simulink的编码器。金宝app
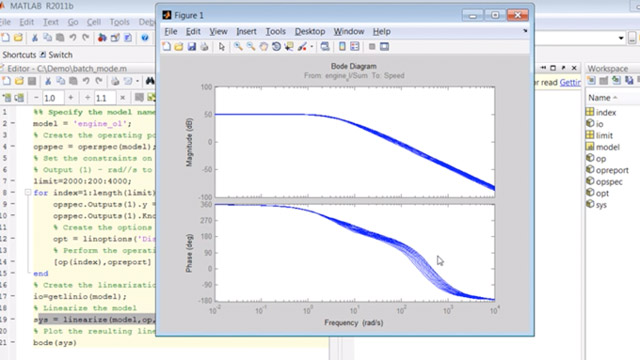
莱尼分析
线性化Sie Simulink- m金宝appodelle mit dem线性分析工具在Simulink控制设计™中。在线性化的模态中,有时间和频率的模态,有弹性模态的模态,有脉冲模态的模态,有波德模态的模态,有尼克斯模态的模态,有奇异模态的模态。
Reglerdesign
在Si金宝appmulink modellierte SISO-Feedbackschleifen拉森SICH麻省理工学院的Simulink控制设计grafisch optimieren。Entwerfen SIE Regler公司MIT interaktiven Bode-,Wurzelortskurven- UND尼科尔斯-Diagrammen的ZumHinzufügen,Bearbeiten UND Entfernen冯Polstellen,Nullstellen UNDVerstärkungsfaktoren。

Regleroptimierung
您可以在Simulink modelliert wurden中实现最优的自动化。金宝app在Simulink中,控制系统调谐器应用于控制系统的优化设计中,在Simulink中设计出最优的控制方案和最优的电机,在反馈系统金宝app中设计出最优的电机和最优的电机。

抵达Neue Funktionen
现场编辑任务
在einem Live-Skript中,对模式转换和反模式符码与一般模式符码的转换进行了研究
详细信息请见附件,谢谢您的帮助Versionshinweisen。