机器人和自主系统的MA金宝appTLAB和Simulink
开发从感知到运动的自主应用,优化系统级行为
机器人研究人员和工程师使用MATLAB®和仿真软金宝app件®设计、模拟和验证自动系统的每个方面,从感知到运动。
- 将机器人系统建模到最细微的细节,如传感器噪声和电机振动。
- 用精确的运动学,动力学和联系属性模拟机器人系统。
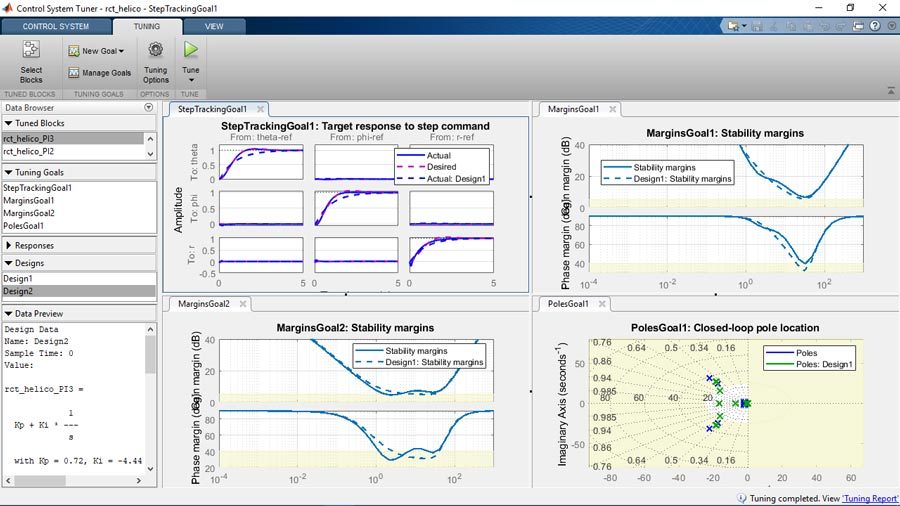
- 设计和优化高级自治和低级控制。
- 用维护的算法库综合和分析传感器数据。
- 逐渐验证机器人设计或算法,从仿真到循环(HIL)测试。
- 通过ROS或直接将算法部署到微控制器、fpga、plc和gpu上。
“基于模型的设计和自动代码生成使我们能够应对敏捷Justin提出的53个自由度的复杂性。如果没有基于模型的设计,就不可能为如此复杂的机器人系统构建具有实时性的控制器。”
Bäuml,德国航空航天中心(DLR)



处理传感器数据
利用MATLAB和Simulink中强大的工具箱实现传感器数据处理算法。金宝app
- 通过ROS、串行和其他类型的协议连接到传感器。
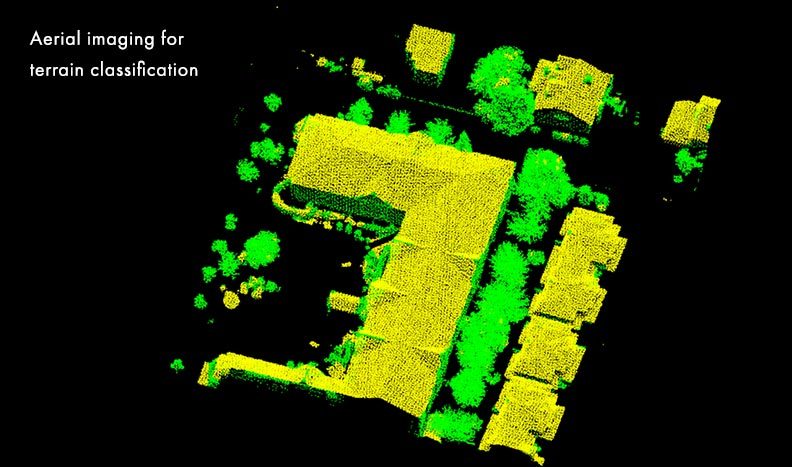
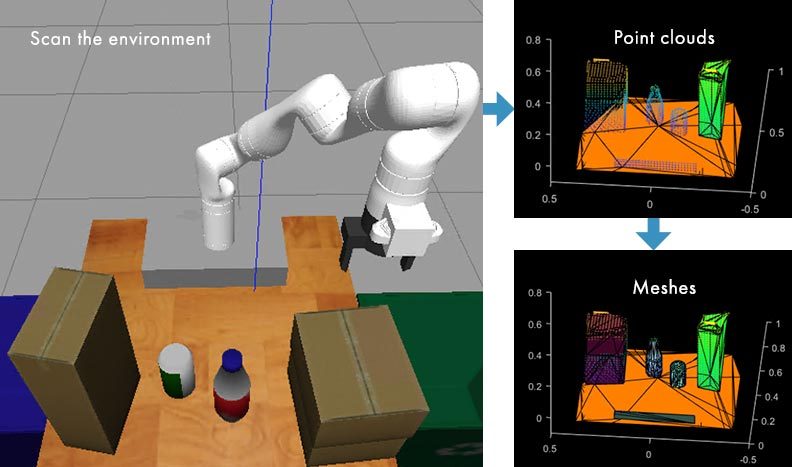
- 可视化摄像机,声纳,LIDAR,GPS和IMU的数据。自动化公共传感器处理任务,如传感器融合,过滤,几何变换,分段和注册。
教程
探索产品下载188bet金宝搏
教程
- 自主导航,第4部分:使用A*和RRT的路径规划(17:54)
- 机器人操纵器的轨迹规划(18:21)
- 使用红外传感器用于机器人导航(35)
教程
- 金宝appSimulink模块用于机器人操作机和安全轨迹跟踪控制(2:58)
- 人形行走模型控制(19:38)
- 理解模型预测控制,第1部分:为什么使用MPC?(4:50)
探索产品下载188bet金宝搏
与平台和目标进行沟通
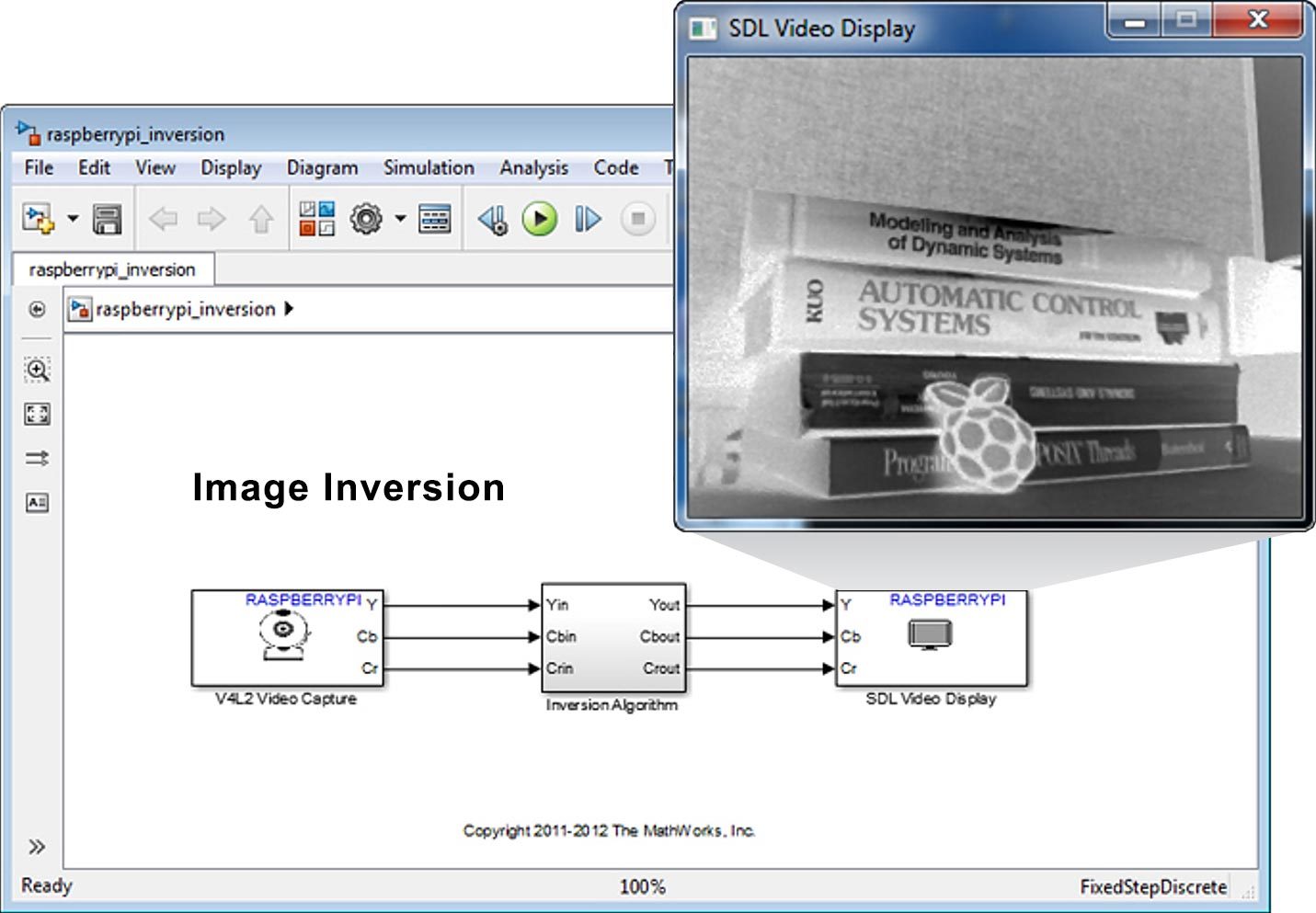
将自动算法应用到基于ros的系统和Arduino等微控制器上®和覆盆子pi™。通过协议与嵌入式目标进行通信,包括CAN,EtherCAT®,802.11™,TCP / IP,UDP,I2C,SPI,Modbus®和蓝牙®。
“使用MATLAB和Simulin金宝appk,我们可以使用单个环境进行控制算法开发,调试,数据分析以及更多 - 而不是在多个工具之间切换。该集成可降低整体项目开发时间和引入错误的机会。“
John Wen博士,Rensselaer理工学院

免费试用
30天的探索在你的指尖。

有问题吗?
与机器人专家交谈。