用于控制系统的MATL金宝appAB和Simulink
设计,测试和实施控制系统
控制系统工程师使用MATLAB®和仿真软金宝app件®在开发的所有阶段——从工厂建模到设计和调整控制算法和监控逻辑,一直到部署自动代码生成和系统验证、验证和测试。MATLAB和Simu金宝applink提供:
- 一个多领域的框图环境,用于建模植物动力学,设计控制算法,并运行闭环仿真
- 使用系统识别或物理建模工具进行工厂建模
- 预建的功能和互动工具,用于分析过冲,上升时间,相位裕度,增益裕度,以及其他性能稳定的特点在时间域和频域
- 根轨迹图,波特图,LQR,LQG,鲁棒控制,模型预测控制,以及其他设计和分析技术
- 自动调整PID,增益调度,和任意的SISO和MIMO控制系统
- 执行调度、模式切换和故障检测、隔离和恢复(FDIR)的监视逻辑的建模、设计和仿真
“使用MathWorks工具进行基于模型的设计,我们不仅模拟了控制算法,还模拟了物理硬件。通过为控制软件和测试平台自动生成代码,我们减少了开发时间并快速实现了更改。我们将模拟和测试结果可视化,这让我们对最终部署的设计有了信心。”
大卫Gendre,Astrium公司

用MATLAB控制系统


模拟和模拟植物动态
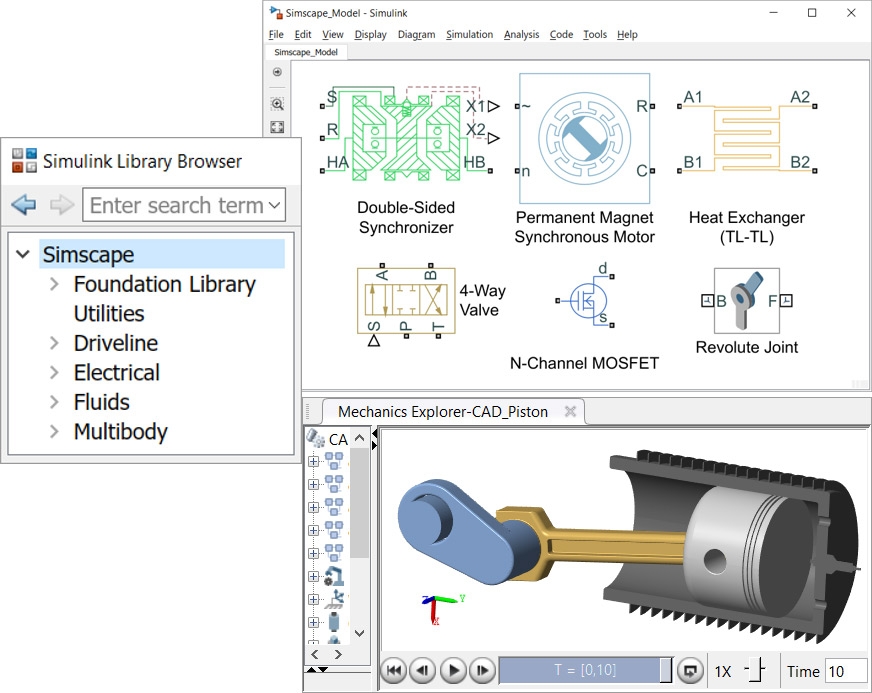
使用MATLAB和Simuli金宝appnk建立精确的设备模型。描述了使用各种支持建模的工厂的复杂动态的方法,并利用每个组件的最合适的方法在您的工厂创建系统级的工厂模型。金宝app
利用系统识别从投入产出数据估算装置动态,当你不知道该模型的详细结构。可替代地,创建复杂的多畴工厂模型,而无需使用以导出下面的第一原理方程物理建模工具。使用代表机械、电气、磁性、液压、气动和热组件的块来绘制组件的地形和系统的物理连接。
了解更多
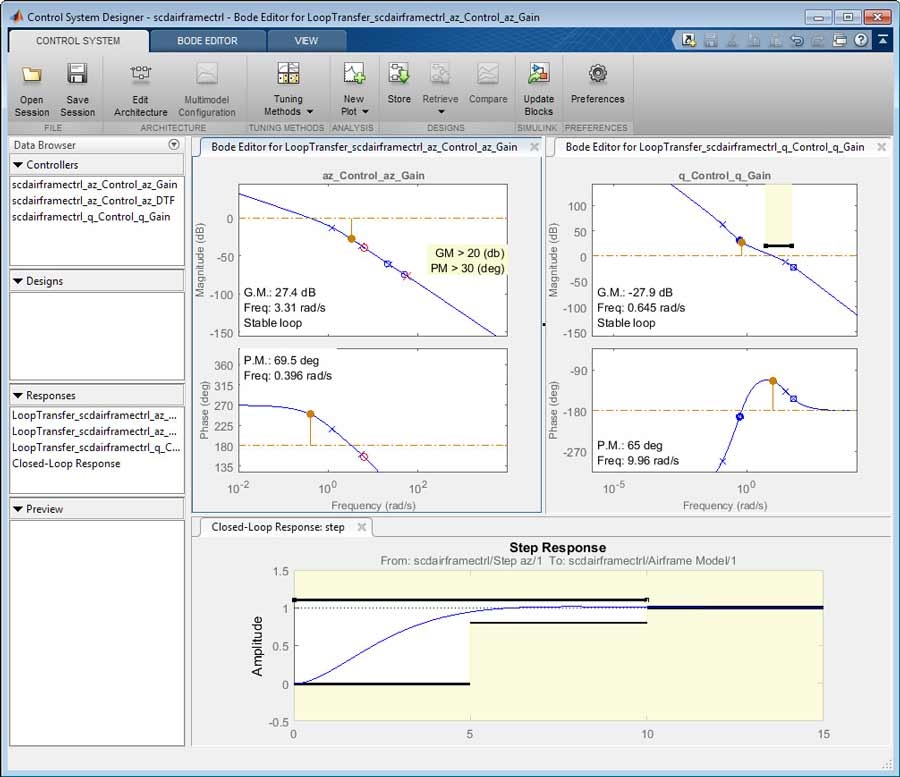
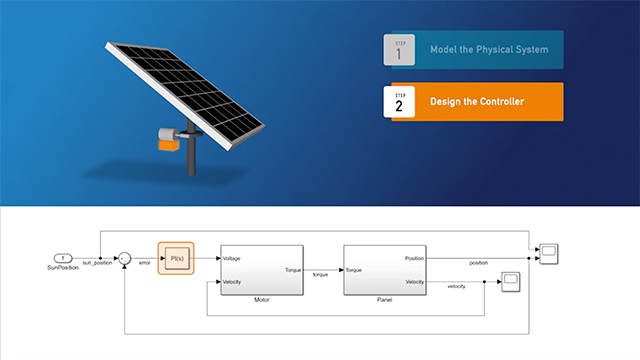
设计和调整反馈补偿器
分析和开发闭环补偿器,并评估关键性能参数,如超调、上升时间和稳定裕度。修剪和线性化非线性Simulink模型。金宝app您还可以建模和分析不确定性对模型的性能和稳定性的影响。
利用波德图、根轨迹和其他线性控制设计技术,在仿真模型或测试硬件上自动调整PID控制器。预构建的工具允许您自动调整分散的多变量控制器,并利用先进的控制策略,如模型预测控制和鲁棒控制。使用优化方法计算控制器增益,以满足上升时间和超调约束。
了解更多
- 直流电机PID控制器的设计(3:53)
- 控制系统设计与控制系统设计师App(3:52)
- 内置PID自动调节器(35)
- 直升机飞行控制系统的自动调谐(4:56)
探索产品下载188bet金宝搏
设计并模拟监控逻辑
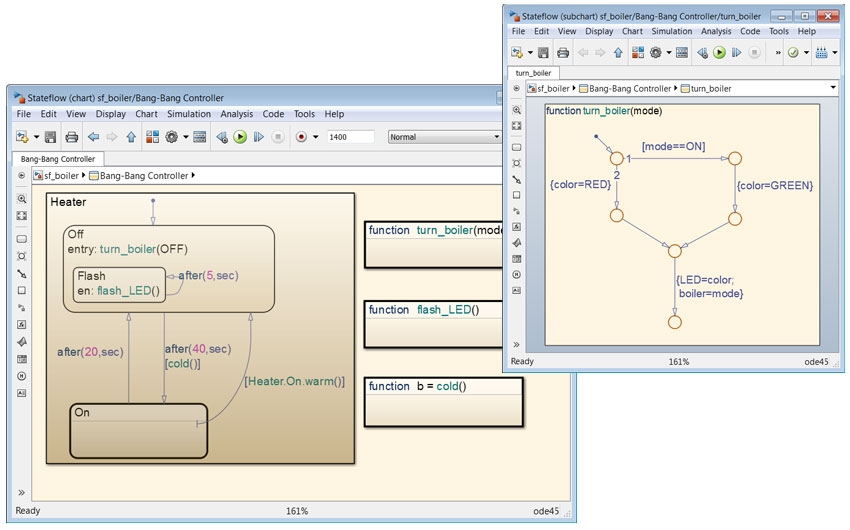
用Stateflow的®对控制系统中的监控逻辑进行建模、设计和模拟,该逻辑安排控制器的操作,控制系统的操作模式,并执行故障检测、隔离和恢复(FDIR)。
使用图形编辑器来构建你的逻辑状态机或流程图。您还可以结合图形和表格表示,包括状态转换图,流程图,状态转换表和真值表,对模型的系统响应事件,基于时间的条件,以及外部输入信号如何。通过使用状态图动画来强调活动状态和转换在模型模拟过程可视化系统的行为。
部署设计,嵌入式控制器
一旦你设计你的控制系统算法,您可以优化他们的实现。您可以指定设计的定点数据类型属性与定点运算的实现做好准备。在闭环桌面仿真验证控制算法后,通过自动生成C,结构化文本,或HDL代码将其部署到生产微控制器,PLC和的FPGA。
您可以不断地测试和验证您的控制系统。通过在嵌入式控制器上运行控制算法,在与控制器相连的目标计算机上实时运行工厂模型,进行半实物(HIL)测试。您可以使用以下命令进一步验证和测试您的控制系统形式化验证方法。
了解更多
探索产品下载188bet金宝搏

获取免费试用
30天唾手可得的探索。