로봇공학및자율시스템을위한matlab및simulin金宝appk
인식부터모션에이르기까지까지자율응용프로그램을개발시스템수준거동을을화할수
로봇로봇공학연구원과과엔지니어들엔지니어들matlab®및s金宝appimulink.®를사용하여인식부터에에이르기까지자율자율의모든측면설계,시뮬레이션및검증。
- 센서잡음,모터진동과같은가장세부세부적인부분까지로봇시스템모델링모델링
- 정확정확운동학,동역학및접촉속성으로로봇을시뮬레시뮬레시뮬레。
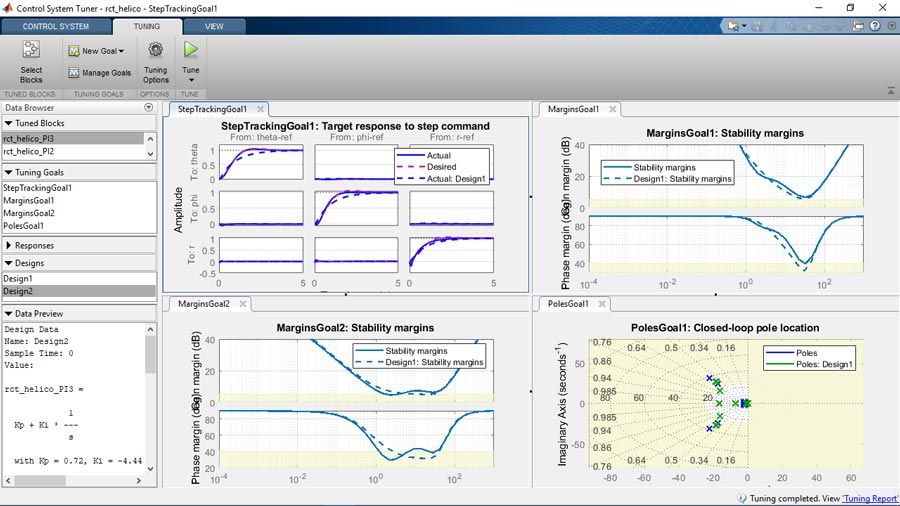
- 고수준자율성과자율성과저수준수준를모두설계하고하고최적화화
- 관리되는알고리즘라이브러리사용하여센서데이터를를합성및분석분석
- 시뮬레이션에서hil(硬件循环)테스트까지로봇설계또는알고리즘점진적으로검증합니다。
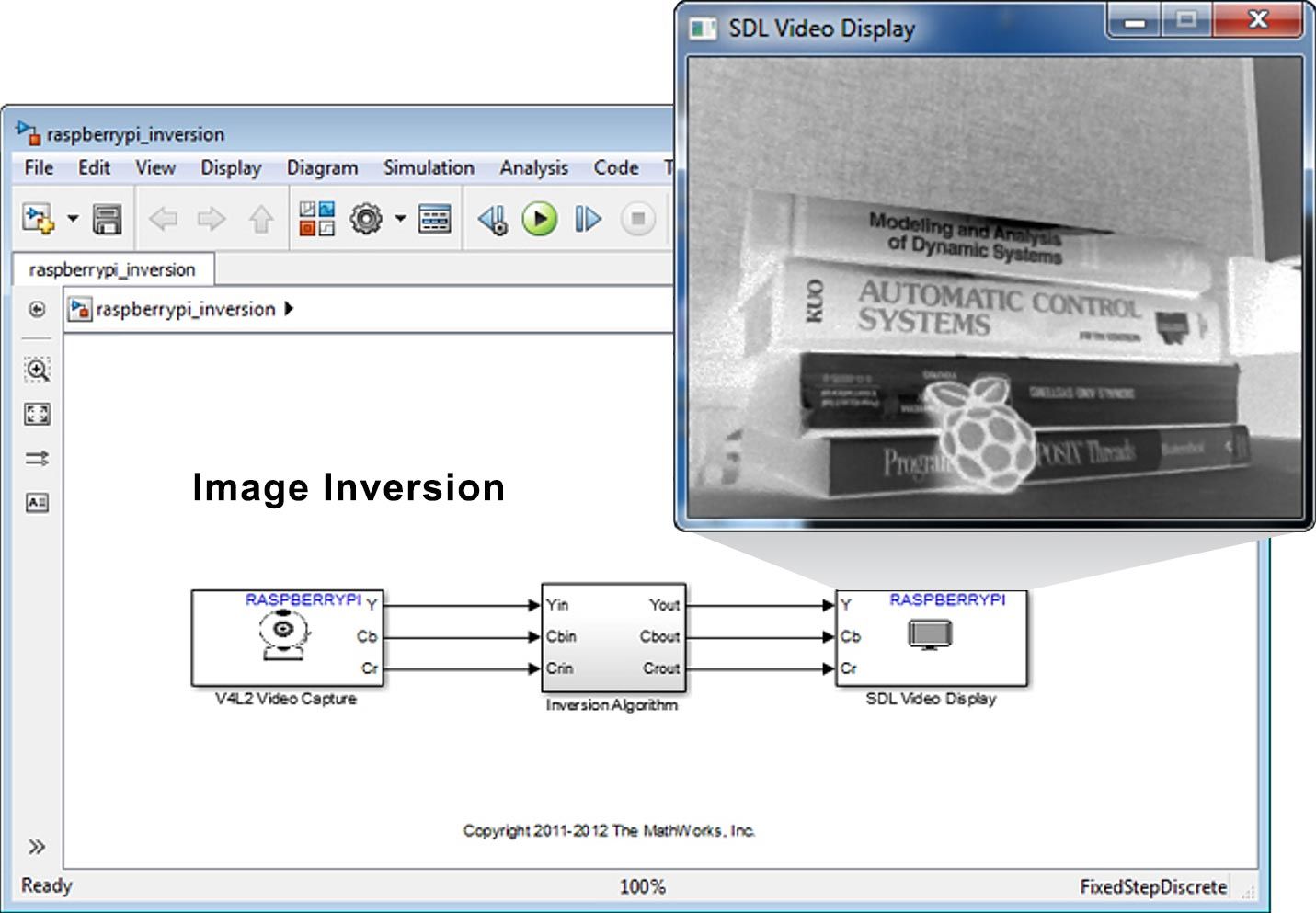
- ROS를통해로봇에알고리즘배포하거나하거나마이크로컨트롤러,fpga,plc및gpu에직접배포합니다。
“모델모델기반설계와와자동코드덕분덕분에덕분에justjust의의자유도에서에서비롯된복잡성에할수모델기반가없었다면경성실시간성능을가진이처럼복잡한로봇시스템에제어기를절대만들수없었을겁니다。“
德国航空航天中心(DLR)Bertholdbäuml



센서센서이터처리
matlab및si金宝appmulink의강력툴박스로툴박스로센서데이터처리처리알고리즘알고리즘을구현할수
- ROS,직렬직렬및기타유형의프로토콜을통해센서에연결할수
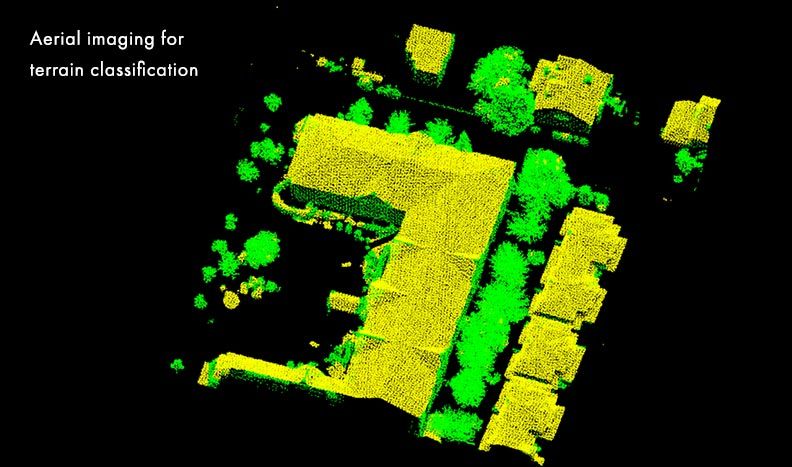
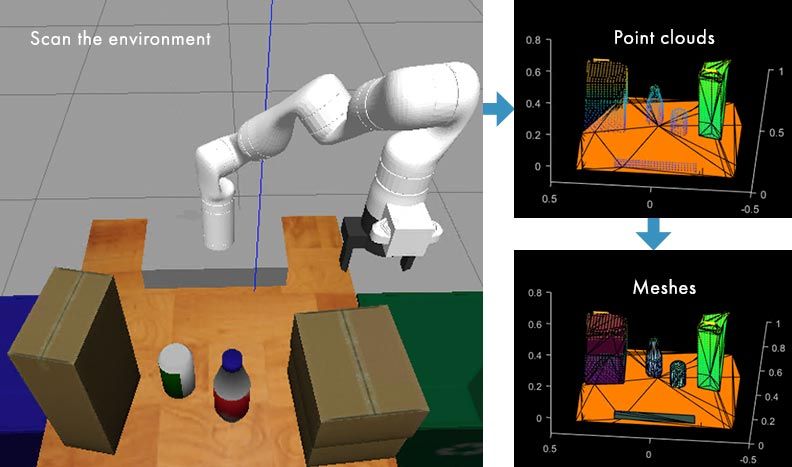
- 카메라,소나,라이다,gps및imu의데이터를를시각화할수수센서융합,필터링,기하기하,분분,정합과같은일반적센서처리을을할수있습니다。
튜토리얼
- 센서융합및추적의이해,2편:자석,가속도계및자이로스코프를를융합한방향(16:00)
- matlab및si金宝appmulink를사용한임베디드(2:43)
- MATLAB에서라이다데이터수집수집시작(6:31)
플랫폼및타겟과통신
arduino.®,Raspberry Pi™와같은마이크로마컨트롤러및및및및배포할수에알고리즘을배포할수수可以,以太卡®,802.11™,TCP / IP,UDP,I2C,SPI,Modbus®및蓝牙®등등의프로토콜을을통해임베디드통신할수수타겟과통신할수
튜토리얼
“Matlab및si金宝appmulink를사용하면하면여러사이를오갈필요없이하나하나환경에서제어개발,디버그,데이터분석분석을많은작업을수행할수수이런통합환경덕분에전체프로젝트개발이단축되고오류발생가능성을을낮출수수있습니다낮출낮출수수수낮출낮출낮출수수있습니다낮출낮출수수수낮출낮출낮출수수낮출낮출낮출수수낮출낮출낮출낮출수시간낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출수낮출낮출수낮출낮출수수수수낮출낮출수수수낮출수낮출낮출낮출낮출낮출낮출낮출낮출수낮출낮출낮출낮출낮출낮출낮출낮출낮출수낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출수낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출수낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출수낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출수낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출낮출수낮출낮출낮출낮출낮출낮출낮출
John Wen博士,Rensselaer理工学院

무료가판받기
30일동안사용해보십시오。

질문이있습니까?
로봇공학전문가와상의해보십시오。