机器人技术研究人员和工程师使用MATLAB®和仿真软金宝app件®设计、模拟和验证自治系统的方方面面,从感知到运动。
- 模型机器人系统最好的细节,如传感器噪声,电动机振动。
- 模拟机器人系统与准确的运动学、动力学和接触特性。
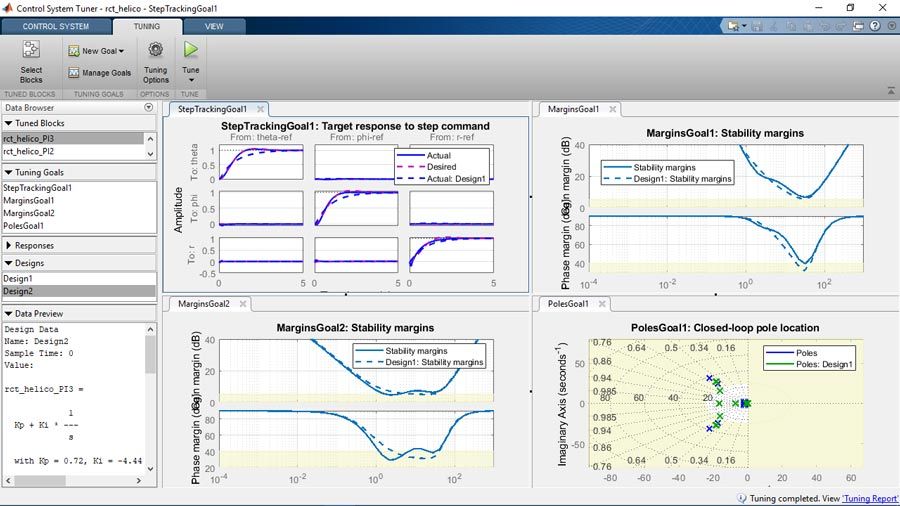
- 设计和优化高度自治和底层控制。
- 合成和分析传感器数据维护图书馆的算法。
- 验证机器人设计或算法逐渐从模拟到半实物(边境)测试。
- 部署算法直接向微控制器,机器人通过活性氧或fpga, plc, gpu。
“基于模型的设计和自动代码生成的复杂性使我们能够应付敏捷贾斯汀的53个自由度。不基于模型的设计是不可能建立这样一个复杂的机械系统的控制器很难实时性能。”
Berthold Bauml德国航空航天中心(DLR)



了解更多
探索产品下载188bet金宝搏
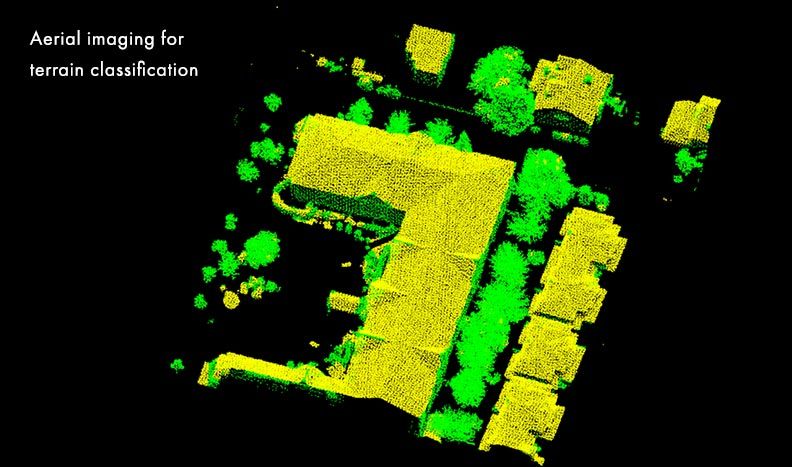
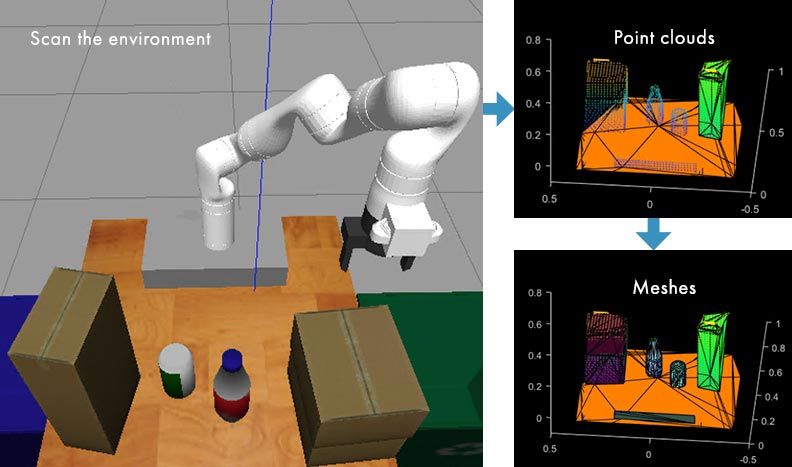
处理传感器数据
实现传感器数据处理算法与强大的MATLAB和Simulink工具箱。金宝app
- 连接到传感器通过ROS、串行和其他类型的协议。
- 可视化数据从相机、声纳、激光雷达,GPS,艾莫斯。自动化通用传感器加工任务,如传感器融合、过滤、几何变换,分割和登记。
探索产品下载188bet金宝搏
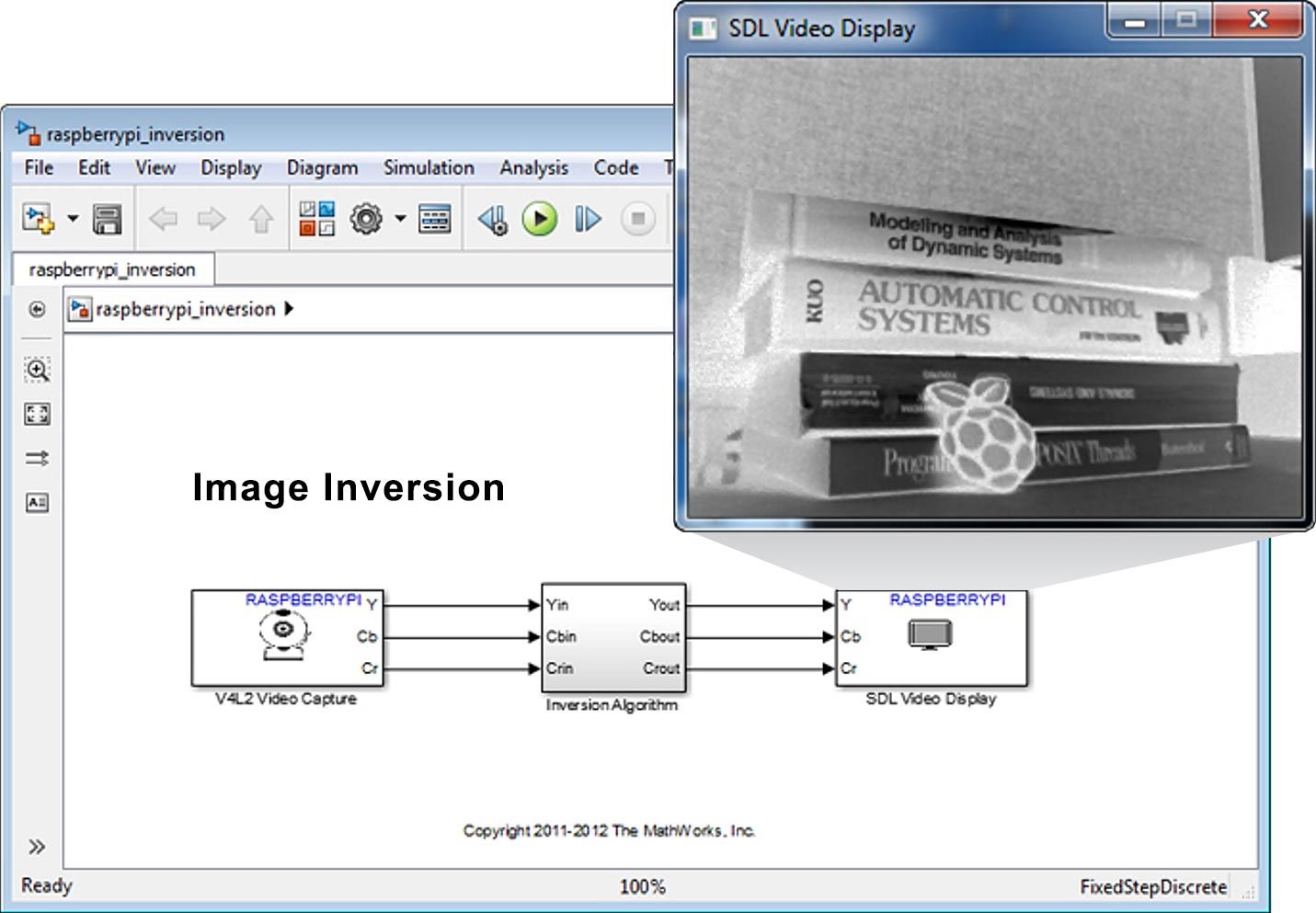
与平台和交流的目标
部署智能算法ROS-based Arduino等系统和微控制器®和树莓π™。与嵌入式目标通过协议,包括可以,EtherCAT®,802.11™,TCP / IP、UDP、I2C、SPI、网络通讯协议®,蓝牙®。
“和MATLAB仿真软件,我们可以金宝app使用一个环境控制算法开发,调试,数据分析,和多进行切换多个工具。集成减少整个项目的开发时间和引入错误的机会。”
约翰·温博士伦斯勒理工学院

30天的免费试用
开始
有问题吗?
跟一个机器人专家。