MATLAB和Simu金宝applink的
移动机器人
MATLAB®和模拟金宝app®为开发自主移动机器人(AMRS),服务机器人和其他无人机(UGV)提供算法,建模和仿真工具,ROS和硬件连接。
使用Matlab和Simulin金宝appk,您可以:
- 导入机器人的虚拟模型,细化机械设计和电子部件的要求
- 模拟惯性导航系统和GNSS传感器的传感器模型
- 使用粒子滤波和蒙特卡罗定位算法来定位你的机器人
- 使用同步定位和映射(SLAM)算法构建环境地图
- 使用A*、RRT等路径规划算法寻找最优路径
- 使用路径指标,如平滑度和清除障碍,评估路径最优性
- 使用路径跟踪和避障控制算法在动态环境中导航
- 为目标硬件自动生成生产代码

使用MATLAB和Simulink金宝app
适用于移动机器人


平台开发
构建或进口物理模型,并模拟轮式和腿机器人的机器人动力学。应用现实世界的约束,例如接触力和扭矩,以分析算法对硬件平台的影响。使用Matlab和Simulin金宝appk,您可以:
- 使用运动学运动模型和车轮编码器为典型的移动机器人设计,如差动驱动器要么Ackermann转向
- 用机械机械的物理建模设计详细的动态模型
- 从CAD软件导入机械设计并在单一仿真模型中使用电气和控制系统连接它们
- 与外部机器人模拟器(如凉亭为环境建模)接口
- 连接到ROS / ROS2中间件
教程
- 在Simscape中创建虚拟机器人环境:添加物理、对象交互和自主权
- 基于Simulink的移动机器人避碰仿真金宝app(45:02)
- 建模剪刀式升降机(7:32)
- 实时模拟:剪刀升降机(4:49)
探索产品下载188bet金宝搏
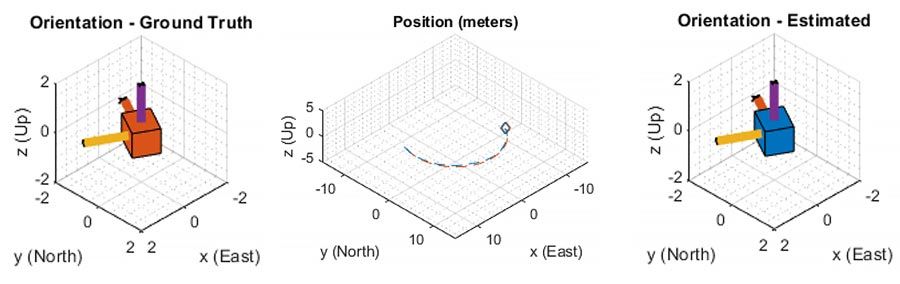
感知和定位
使机器人愿景能够构建环境贴图并本地化移动机器人。使用传感器模型和预设算法开发映射,本地化和对象检测应用程序,因此您的移动机器人可以学习其周围环境和位置。使用Matlab和Simulin金宝appk,您可以:
- 模拟并融合IMU和GPS传感器读数,以达到精确姿态估计
- 本地化利用LIDAR的机器人使用自适应蒙特卡罗定位算法
- 使用和可视化2D和3D地图使用激光雷达大满贯要么单眼视觉大满贯
- 通过使用互动修改回路闭环来提高地图精度SLAM地图构建应用
- 通过创建和可视化来表示动态环境Egocentric占用地图
- 用于使用安全机器人导航的检测,识别和跟踪对象深度学习以及YOLO、SSD和CNN等机器学习算法
教程
- 自主导航,第2部分:理解粒子滤波器(15:51)
- 自主导航,第3部分:利用位姿图优化理解SLAM(16:21)
- 什么是目标检测?(3:20)
- 自主系统如何“看”?
了解更多
运动规划与控制
为你的移动机器人找到到达目的地的路径。生成路径点并发送控制命令来遵循全局路径或局部轨迹。针对移动机器人在未知环境中的导航,MATLAB和Simulink提供了基于搜索和采样的规划算法和路径跟踪控制算法。金宝app使用MATLAB和Simulin金宝appk,你的机器人可以:
- 找到最短的和无障碍的路径使用算法,例如一个*和RRT
- 在一个动态的环境中安全地导航障碍当地的规划
- 可视化和评估计划的路径指标比如平滑度和距离障碍物的距离
- 通过非线性模型预测控制优化路径
- 请按照规划的路径使用纯追求控制器
- 计算转向命令使用矢量字段直方图避免障碍
- 使用强化学习来避免障碍DDPG等方法
教程
- 自主导航,第4部分:带*和rrt的路径规划(17:54)
- 移动机器人和MATLAB机器人的运动规划
- 自主机器人的路径规划与导航(20分)
探索产品下载188bet金宝搏

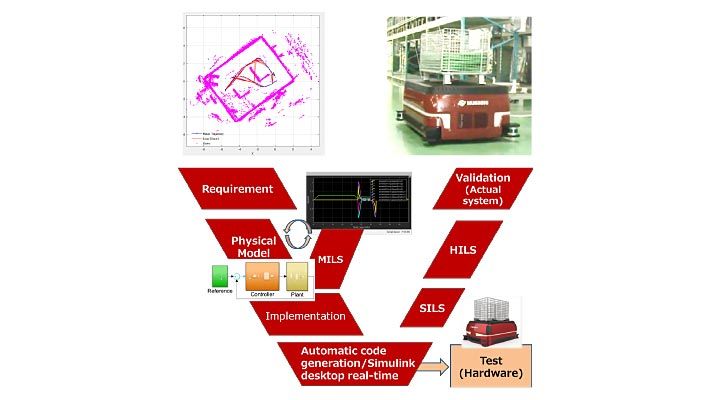
基于仿真的测试
使用仿真检测设计误差并降低硬件测试的风险和成本。MATLAB和SIMU金宝appLINK提供交互式应用和仿真工具,以优化移动机器人应用程序的性能以及开发和测试时间。使用Matlab和Simulin金宝appk,您可以:
- 生成轨迹模拟传感器运动和校准他们的表现
- 消除轮式编码器的误差来源通过分析测程估计
- 使用抽象模型快速验证您的自主算法或构建更高的保真型号
- 联系对凉亭进行时间同步联合仿真在闭环模拟中测试你的算法
- 在部署在移动平台上之前,在各种边缘案例场景中运行导航算法
- 自动生成C / C ++,VHDL®/ Verilog.®, CUDA®C / C ++代码用于快速原型制作和生产使用

获得免费试用
在你的指尖探索30天。

有问题吗?
与机器人专家交谈。