使用深度学习的对象检测
卷积神经网络(cnn,或ConvNets)是深度学习的基本工具,在图像分类、目标检测和识别任务中特别有用。cnn被实现为一系列互连层。这些层是由重复的卷积块、ReLU(修正线性单元)和池化层组成的。卷积层用一组滤波器对它们的输入进行卷积。这些过滤器是在网络训练中自动学习的。ReLU层为网络增加了非线性,使网络能够近似图像像素与图像语义内容之间的非线性映射。池化层对它们的输入进行下采样,并帮助整合局部图像特征
卷积神经网络需要深度学习工具箱™。CUDA支持培训和预测金宝app®-Apapable GPU,计算能力为3.0或更高。建议使用GPU并需要并行计算工具箱™
您可以构建CNN架构,使用语义分割列车训练网络,并使用培训的网络预测类标签或检测对象。您还可以从备用网络中提取功能,并使用这些功能培训分类器。此外,您可以执行传输学习,该传输学习在新数据上检索CNN.You也可以使用图片标志,贴标签机视频、特征提取器和分类器来创建自定义检测器
功能
主题
开始
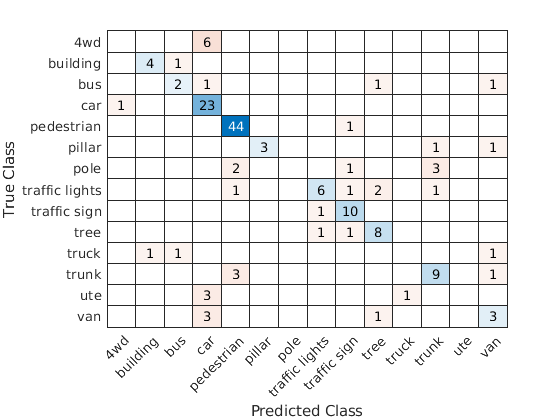
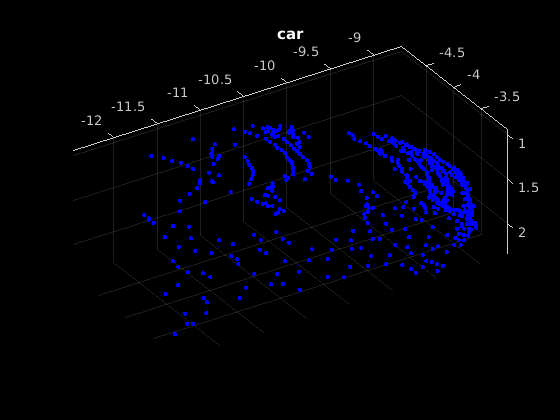
比较可视化功能。
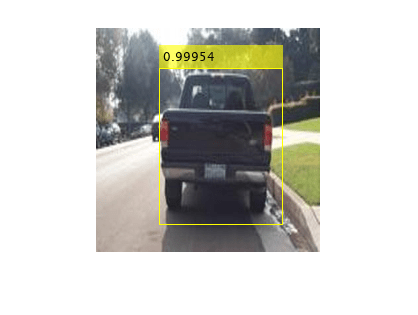
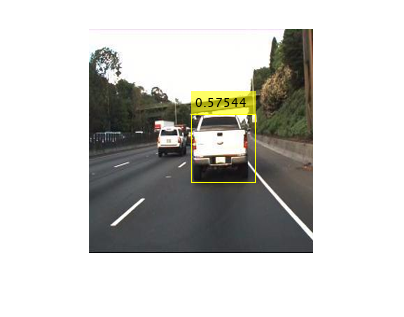
利用深度学习神经网络进行目标检测。
Getting Started with R-CNN, Fast R-CNN, and Faster R-CNN
R-CNN,FAST R-CNN和更快的R-CNN基础知识
使用掩模R-CNN和Deep Learning执行多种组件实例分段。
你只看一次(YOLO) v2基础
单发检测基础。
用于深度学习对象检测的锚盒的基础知识
基于深度学习的目标检测
深网络设计师(深度学习工具箱)
深度学习层列表(深度学习工具箱)
发现MATLAB中所有的深度学习层®.
在Matlab中深入学习(深度学习工具箱)
在Matlab中发现使用卷积神经网络进行分类和回归的深度学习能力,包括佩戴网络和转移学习,以及GPU,CPU,集群和云的培训。
普里德深度神经网络(深度学习工具箱)
了解如何下载和使用佩带的卷积神经网络进行分类,转移学习和特征提取。
特色的例子




您还可以从以下列表中选择一个网站:
