激光雷达处理
威力登®文件导入、分割、下采样、转换、可视化和激光雷达的三维点云配准
先进的驾驶辅助系统利用激光雷达扫描获得的三维点云来测量物理表面。激光雷达点云处理使您能够对这些点云进行下采样、去噪和转换,然后将它们注册或分割成簇。您还可以读取、写入、存储、显示和比较点云,包括从Velodyne数据包捕获(PCAP)文件导入的点云。
功能
主题
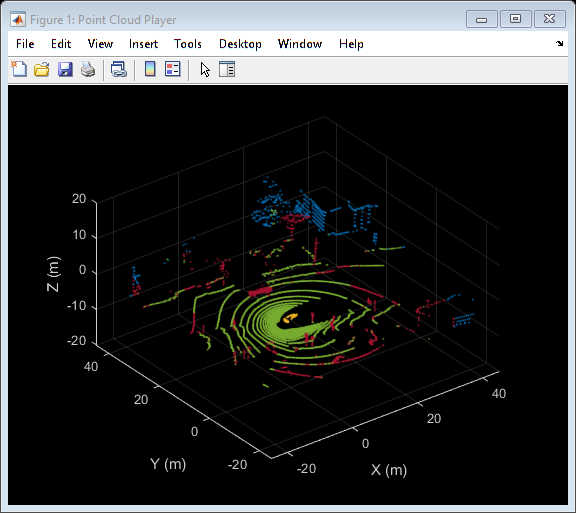
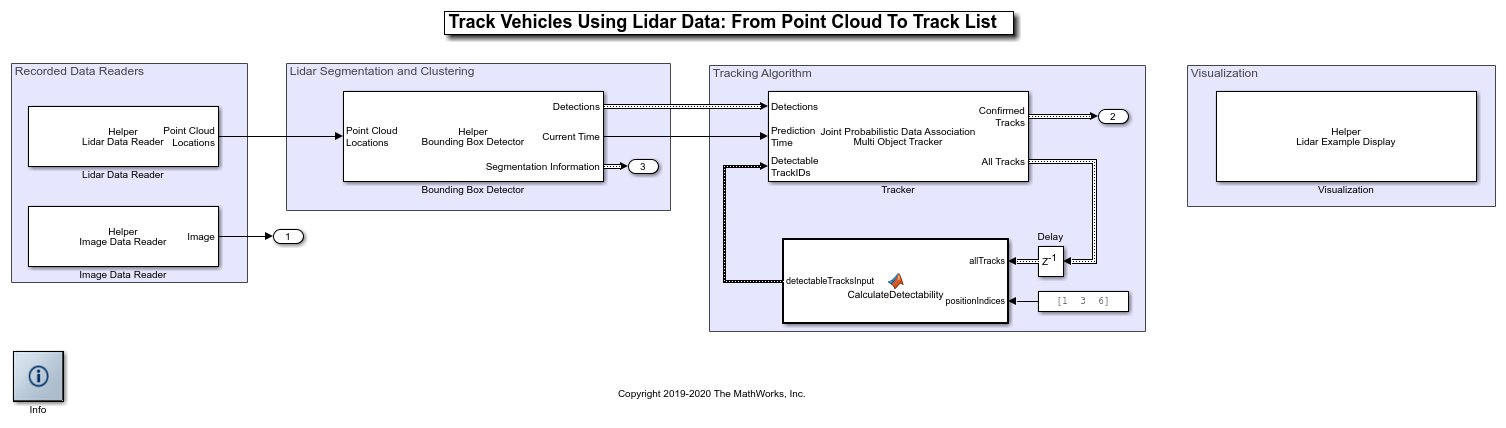
使用激光雷达探测、分类和跟踪车辆(激光雷达工具箱)
该示例通过使用安装在自助车辆上的LIDAR传感器捕获的LIDAR点云数据来说明如何检测,分类和跟踪车辆。
特色的例子

你也可以从以下列表中选择一个网站:
