Localization
Simultaneous localization and mapping, map building, odometry
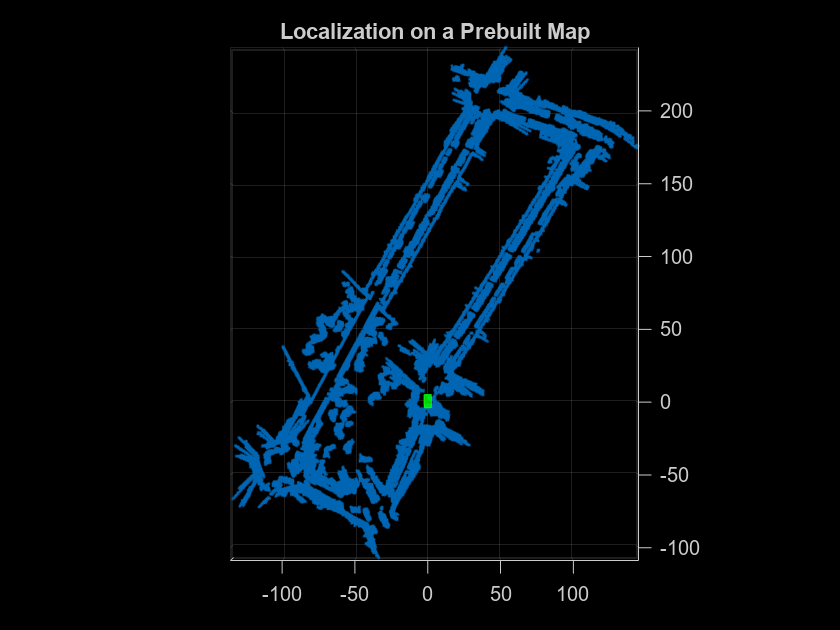
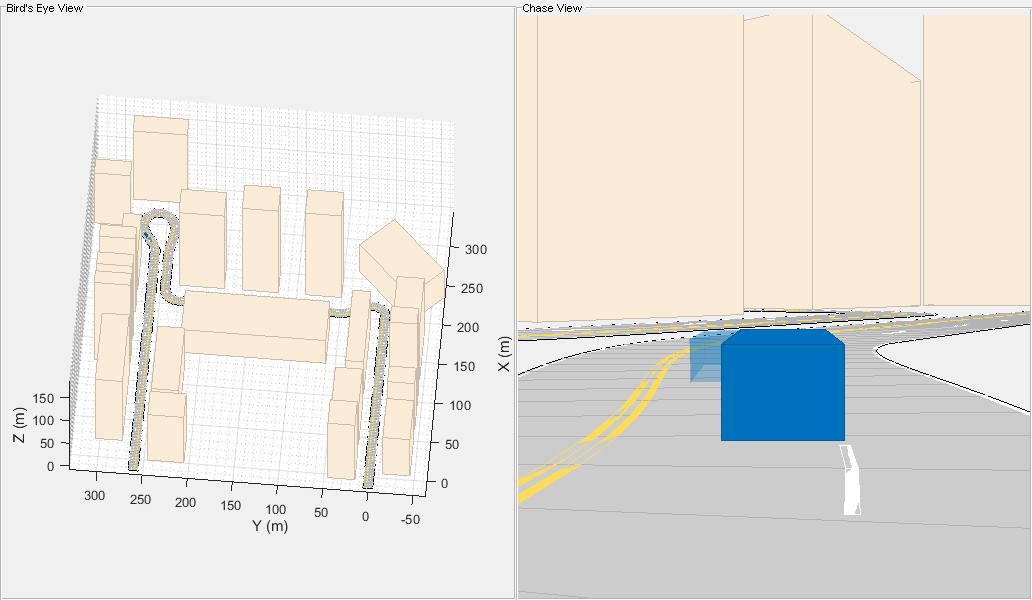
使用同时定位和映射(SLAM)算法根据视觉或激光雷达数据来构建自我车辆周围的地图。使用视觉惯性进程仪根据机上传感器(例如惯性测量单元(IMU))的数据来估计车辆的姿势(位置和方向)。
功能
话题
- 自动驾驶的旋转,方向和四元素
四季度是四部分的超复合数,用于描述三维旋转和方向。了解如何将它们用于自动驾驶应用程序。
- Implement Visual SLAM in MATLAB
理解视觉同步定位d mapping (vSLAM) workflow and how to implement it using MATLAB.
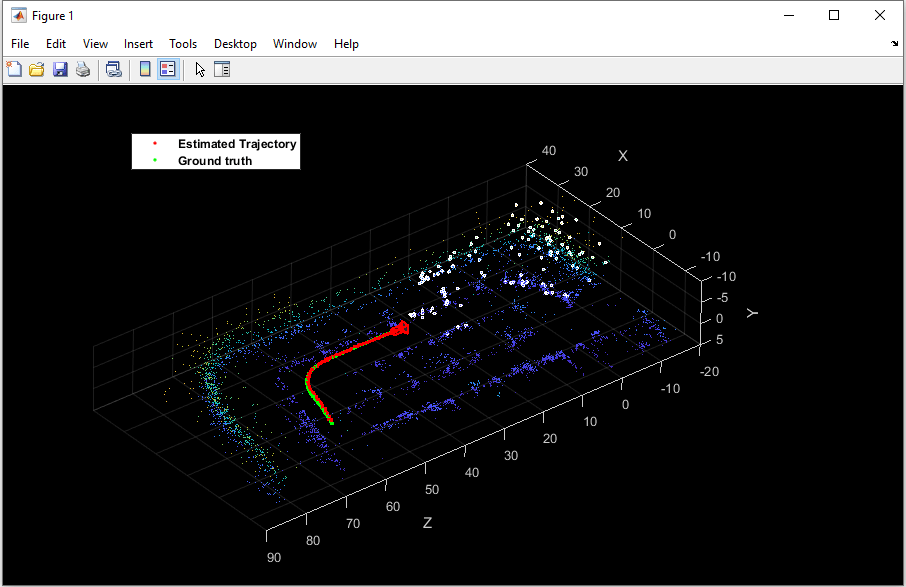
- 单眼视觉同时定位和映射
视觉同时定位和映射(VSLAM)。
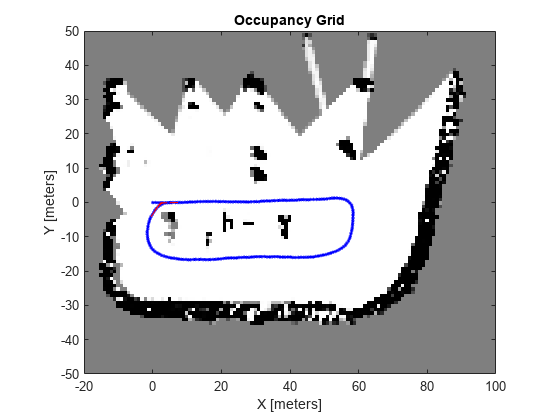
- 在MATLAB中实施点云大满贯
了解点云注册和映射工作流程。
特色示例

You can also select a web site from the following list:
美洲
- América Latina(Español)
- 加拿大(英语)
- 美国(英语)