主要内容
模型和控制器简化
降低工厂模型和合成控制器
良好控制并不总是需要复杂的模型。不幸的是,优化方法,包括基于的方法H∞那H2, 和μ.- 合成最佳控制理论,通常倾向于生产至少与植物模型一样多状态的控制器。模型顺序减少命令可帮助您找到对工厂和控制器型号的更短的低位近似值。
职能
话题
在适用于复杂系统的强大控制器的设计中,模型减少适合几个目标。
Hankel奇异值定义系统中每个状态的能量。基于Hankel奇异值的模型减少技术可以实现减少阶模型,这些模型保留了重要的系统特征。
模型减少例程分为两组,添加误差和乘法误差类型。
减少模型Balancmr.并检查结果模型错误。
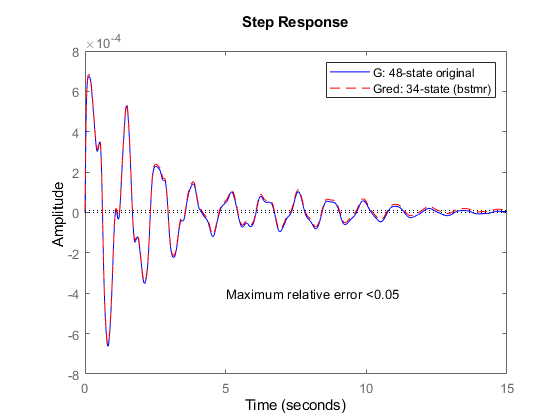
减少模型BSTMR.并检查结果模型错误。
莫德利亚让您在保留时减少模型jω.-axis杆。
莫德利亚可以是减少大型型号时开始的最佳方式。
通过截断模型的平衡的CopRime集来计算缩小阶模型。
简化了从不确定元素建立的不确定模型,以确保模型的内部表示是最小的。
特色例子
您还可以从以下列表中选择一个网站: