帮助中心
传感器融合与跟踪工具箱™ 提供针对特定场景优化的估计滤波器,例如线性或非线性运动模型、线性或非线性测量模型或不完全可观测性。
展开全部
跟踪kf
跟踪EKF
跟踪
跟踪BF
跟踪CKF
trackingIMM
跟踪GSF
跟踪PF
trackingMSCEKF
ggiwphd
gmphd
initcvkf
initcakf公司
initcvekf
initcaekf
初始化
initapekf
初始贝克函数
initcvukf
initcaukf
首创
initcvabf
initcaabf
initcvckf
initcackf
initctckf
伊涅克菲姆
initcvpf
初始CAPF
初始条件
initcvmscekf
initcvggiwphd
initcaggiwphd
初始ggiwphd
initcvgmphd
初始cagmphd
初始GMPHD
initctrectgmphd
警察
治安官
constvelmsc
康斯特维尔姆斯卡
cvmeas
cvmeasjac
cvmeasmsc公司
cvmeasmcjac公司
constacc
constaccjac
浮雕
照相机
constturn
constturnjac
ctmeas
ctmeasjac
ctrect
ctrectjac
ctrectmeas
ctrectmeasjac
ctrectcorners
switchimm
估计滤波器简介
在工具箱中提供的估计滤波器的一般性审查。
线性卡尔曼滤波器
估计和预测使用线性卡尔曼滤波器的对象运动。
扩展卡尔曼滤波器
估计和预测使用扩展卡尔曼滤波器的对象运动。
跟踪使用各种跟踪滤波器机动目标。该示例示出了使用单一的运动模型和多个运动模型滤波器之间的差别。
示出了使用颗粒过滤器和高斯求和滤波器的跟踪仅使用范围的测量的单个对象。
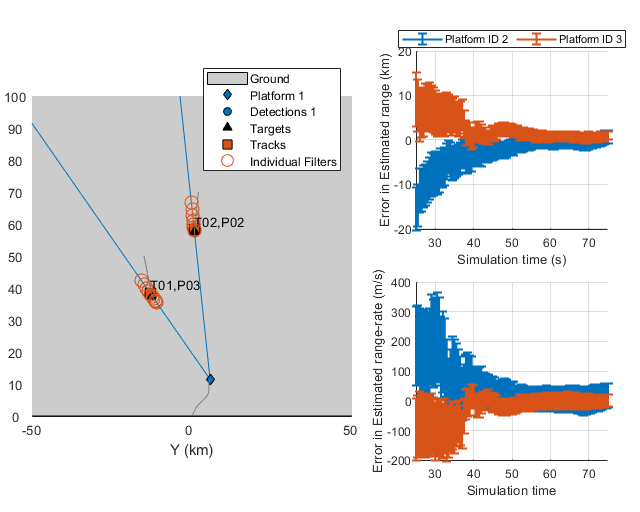
示出了如何使用从单个传感器被动仅用角度测量值来跟踪目标。被动仅用角度测量值包含方位和目标的仰角相对于所述传感器。不存在范围测量值使得挑战作为目标的问题要跟踪只在某些条件下是完全可观察到的。
您单击对应于该MATLAB命令的链接:
在MATLAB命令窗口中输入它运行的命令。Web浏览器不支持MATLAB的命令。金宝app
选择一个网站,以获得翻译的内容,其中可看到当地的活动和优惠。根据您的位置,我们建议您选择:。
也可以从以下列表中选择网站:
选择最佳的网站性能的中国网站(在中国或英文)。其他MathWorks的国家网站都没有从您的位置访问进行了优化。
请联系您当地的办事处
现在就试用