文件交换
MATLAB和Simu金宝applink工具车辆运动学、可视化和传感器模拟。
金宝app仿真软件为Arduino传感器和电机驱动程序库
这个工具箱是一组虚拟环境仿真软件旨在帮助移动机器人的基本概念的教金宝app学
所有文件相关的学生竞争,移动机器人技术培训视频系列。
MATLAB和Simu金宝applink机器人的轨迹生成和评估实例。
MATLAB和Simu金宝applink金宝app支持硬件组件用于Arduino工程装备牧师1
从拉斯维加斯打开激光雷达点数据文件。金宝app支持1.4版本。
简单而直接的dh参数在MATLAB的实现。
计算和可视化的逆运动学2-link机器人手臂的雅可比矩阵,并使机器人写你好。
计算基于导航的GPS接收器位置和观测文件
此功能非常容易实现扩展卡尔曼滤波的GPS定位的例子
工业机器人机械手的工具箱
MATLAB和Simu金宝applink金宝app支持硬件组件用于Arduino工程装备。
纽马克的编写代码的方法对于线性系统和一个示例问题已经解决了
模拟的机械手臂
乐高控制工具箱®头脑风暴®NXT机器人通过蓝牙或USB连接。
地面激光雷达点云过滤/分割基于布(裸土萃取)方法模拟。
RoboDK API允许您直接从Matlab模拟和程序机器人手臂的代码
平面框架使用矩阵的结构分析方法
矢量化四元数的功能
函数将旋转4之间的数据类型:扩张型心肌病,欧拉角、四元数和欧拉参数。
6自由度非线性模拟飞机飞行
SMC控制器与二次极小化,自适应功能和积分作用跟踪供参考。
运动学工具箱用于原型机器人和计算机视觉相关的任务。
GUI情节扭矩概要文件在每个关节的100秒。
情节的身体计划,静水,广州的计算
模拟一个6链接3 d Puma机器人
2维逆运动学仿真3自由度使用伪逆雅可比矩阵
这个项目包括无线电导航计算原理和GPS定位误差修正。
公用事业公司操纵GPS定位数据
鉴于DH参数这个GUI情节机器人和允许你移动它。
n-link平面机械臂的路径规划移动多边形之间的障碍(或点障碍)。设置参数预先构建的示例。
四元数类,矢量化,将旋转表示,数值欧拉传播
遗传算法用于优化机械臂的轨迹规划。
阴谋破坏包络线和交互图在x和y方向的钢筋混凝土柱
发现一个函数使用弧长方法的根源
使用RRT路径规划,RRT *,并且一些gridmaps *。
DH参数
一个软件来分析3 dpc的岩石山坡上,提取其不连续集和PC进行分类。
Dolph-Tschebyscheff数组可以选择所需的旁瓣的不安元素数组。
对于任何一个输入点集的算法不仅能够识别边界边,而且跟踪。
计算比例因子矩阵和MEMS加速度计的偏差向量
计算和情节信噪比与噪声强度的double-well杜芬振荡器。
Epoxi-Laminated复合板块优化分析
开发环境的地图和定位机器人自主导航的姿势。
GUI进行分析的可操纵性,3-PRR机械手的工作空间和路径跟踪
MATLAB模拟4-link机器人,机器人教学基本原则
读入文件在拉斯维加斯1.1格式和输出逗号分隔的文本文件。
这个GUI可以模拟和规范一个非线性动态系统。
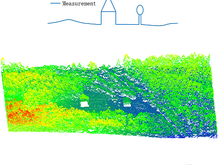
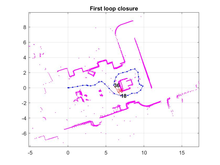
大满贯提取导航使用激光雷达传感器和角落
停车场模拟
这个包包括Webots模拟一个e-puck2机器人由MATLAB程序控制。
我的乐高头脑风暴EV3 GyroBoy使用仿真软件。金宝app大部分高中生证明工程是有趣的。
基于代理仿真框架来验证规划者在自动驾驶合成场景。该示例还演示了取代机动。
GyroLibNav——综合导航系统的简单算法
无人机的全面气动发射器,它可以用于任何类大小的无人机发射器
读取当前机器人工具提示,移动到想要的姿势和取向
这个工具箱提供了对偶四元数方法,专注于三维运动学的点和线。
强化学习使用一个例子与epsilon-greedy q学习的探索
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站:
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室